Constellation
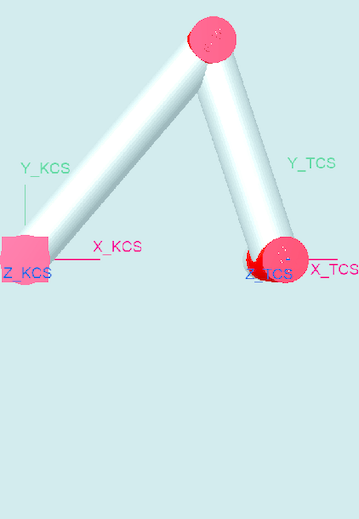
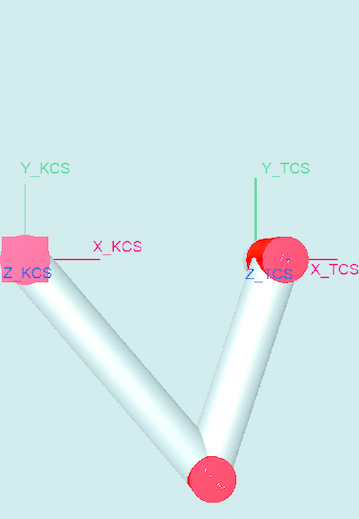
For certain kinematics, the Cartesian pose (ISO 8373: "Combination of position and orientation in space") is not sufficient to clearly describe the joint position. For example, with SCARA robots, the same Cartesian pose can be achieved with 2 different joint positions (see the following figures). The constellation describes the position of the robot during the pose. The constellation is a numbering of the possible joint positions.
|
|
INFORMATION