Konstellation
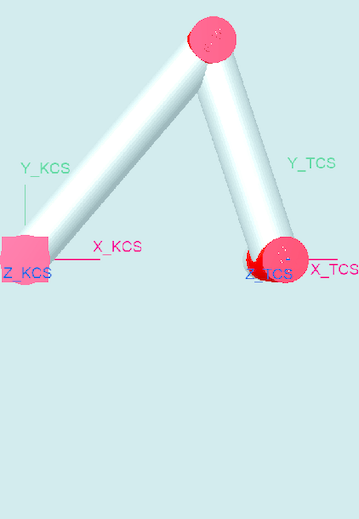
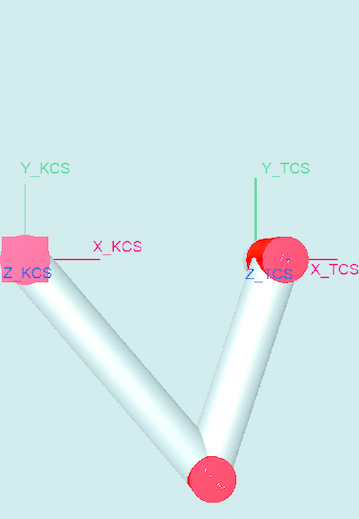
Bei bestimmten Kinematiken reicht die kartesische Pose (ISO 8373: "Kombination von Position und Orientierung im Raum") zur eindeutigen Beschreibung der Gelenkstellung nicht aus. Beispielsweise kann bei SCARA-Robotern, die gleiche kartesische Pose mit 2 unterschiedlichen Gelenkstellungen erreicht werden (siehe folgende Abbildungen). In welcher Stellung der Roboter bei der Pose steht, wird durch die Konstellation beschrieben. Die Konstellation ist eine Nummerierung der möglichen Gelenkstellungen.
|
|
HINWEIS