Roboterumschaltung
Wenn mit einem MOVI-C® CONTROLLER mehrere Roboter betrieben werden, kann im RobotMonitor zwischen den Robotern gewechselt werden. Wenn nur ein Roboter betrieben wird, ist die Schaltfläche deaktiviert.
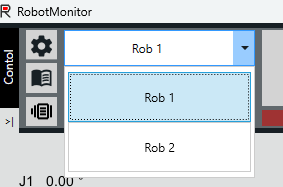
Durch das Umschalten auf einen anderen Roboter, werden die Daten des gewählten Roboters in die Anzeige geladen und die Steuersignale wirken auf den nun gewählten Roboter. HINWEIS: Bei Wechsel des Roboters bleibt der Zugriff auf den ursprünglich gewählten Roboter unverändert, d. h. wenn der RobotMonitor den Zugriff auf den ursprünglich gewählten Roboter hatte ("Get access control" – "Control active"), bleibt der Zugriff im Hintergrund erhalten. Um den Roboter über eine andere Steuerquelle (IEC Userinterface, Feldbus Schnittstelle) anzusteuern, muss zunächst wieder der Roboter im RobotMonitor gewählt und der Zugriff durch den RobotMonitor abgegeben werden.
Zum Übertragen von Programmen von einem Roboter auf den anderen gibt es folgende Vorgehensweisen:
- Import / Export: Wählen Sie den ursprünglichen Roboter und das Programm aus. Exportieren Sie das Programm an einen Wunschort. Schalten Sie im RobotMonitor auf den anderen Roboter um und wählen Sie den gewünschten Programmslot. Importieren Sie das zuvor exportierte Programm. Siehe dazu auch SRL-Programm importieren/exportieren.
- Zwischenablage: Kopieren Sie das gewünschte Programm oder Programmteil des ursprünglichen Roboters in die Zwischenablage. Schalten Sie im RobotMonitor auf den anderen Roboter um und fügen Sie das Programm aus der Zwischenablage über [Einfügen] im gewünschten Programm des Zielroboters ein.
Zum Übertragen von Variablen von einem Roboter auf den anderen gibt es folgende Vorgehensweise:
- Wählen Sie den ursprünglichen Roboter aus. Exportieren Sie die gewünschten Variablen. Schalten Sie im RobotMonitor auf den anderen Roboter um. Importieren Sie die zuvor exportierten Variablen. Mit dieser Vorgehensweise werden alle Variablen des Zielroboters überschrieben. Siehe dazu auch SRL-Variablen importieren.
Das Übernehmen von Programmen und Variablen kann auch auf Dateiebene direkt auf der Speicherkarte des MOVI-C® CONTROLLER erfolgen. Dazu können SRL-Dateien von einem Roboter in den entsprechenden Ordner des anderen Roboters kopiert werden. Dies kann nützlich sein, wenn man alle Daten (Programme und Variablen) eines Roboters auf mehrere andere Roboter übertragen will oder wenn man nur ausgewählte Daten (z. B. nur die MotionSets) übertragen will. Wichtig ist hierbei, immer die eigentliche Datei (ohne Endung) und die *.crc-Datei zu kopieren. Die SRL-Dateien liegen unter data\srlfiles\MyRobot auf der Speicherkarte ab, wobei "MyRobot" der vergebene Name des Roboterknotens ist.
