Behavior during synchronization
The parameters MC_GearIn.RampInMode of the E_RampInMode type and MC_GearIn.CatchUp define the behavior during synchronization. This results in the following cases:
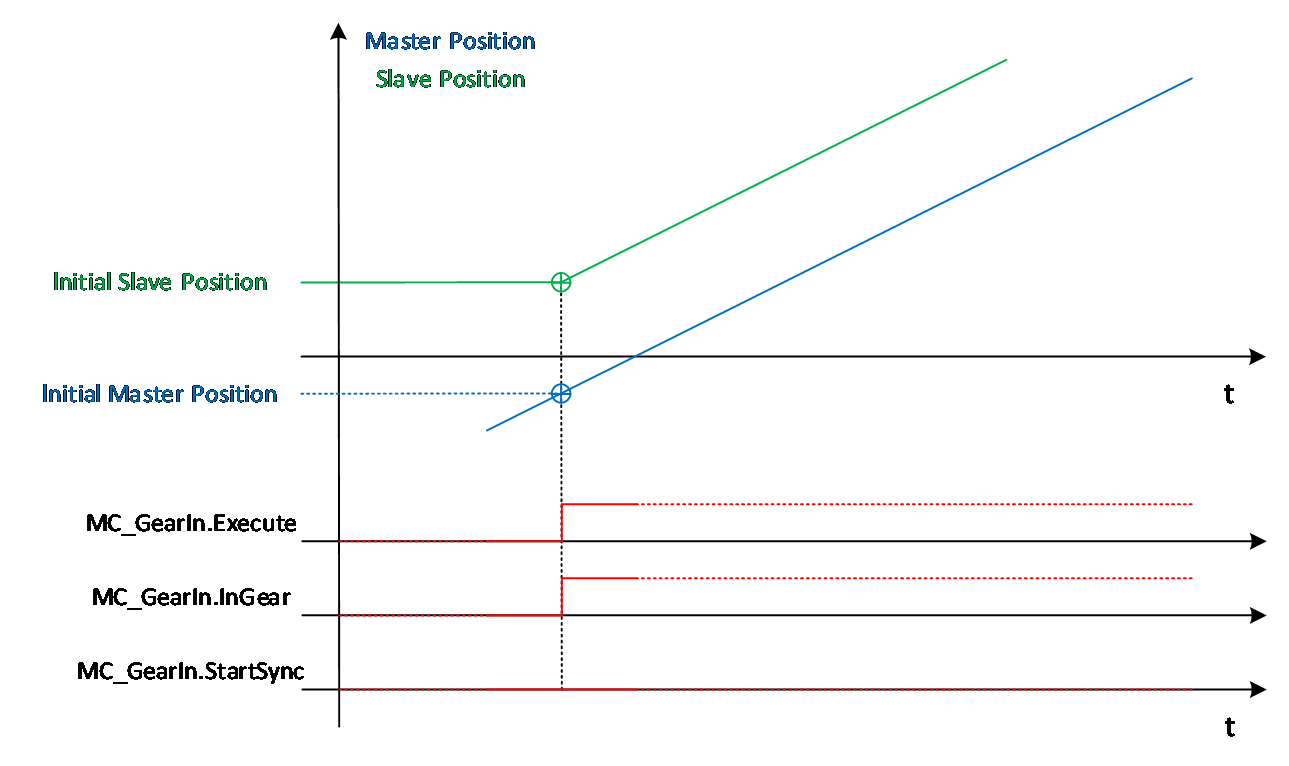
- Case 1: RampInMode = eDirect
- With a rising edge at MC_GearIn.Execute, the slave axis synchronizes and follows the master axis in the ratio specified by RatioNumerator and RatioDenominator. This results in a jump in speed because at the time of the rising edge at MC_GearIn.Execute, the master axis is in motion but the slave axis is in an idle state.

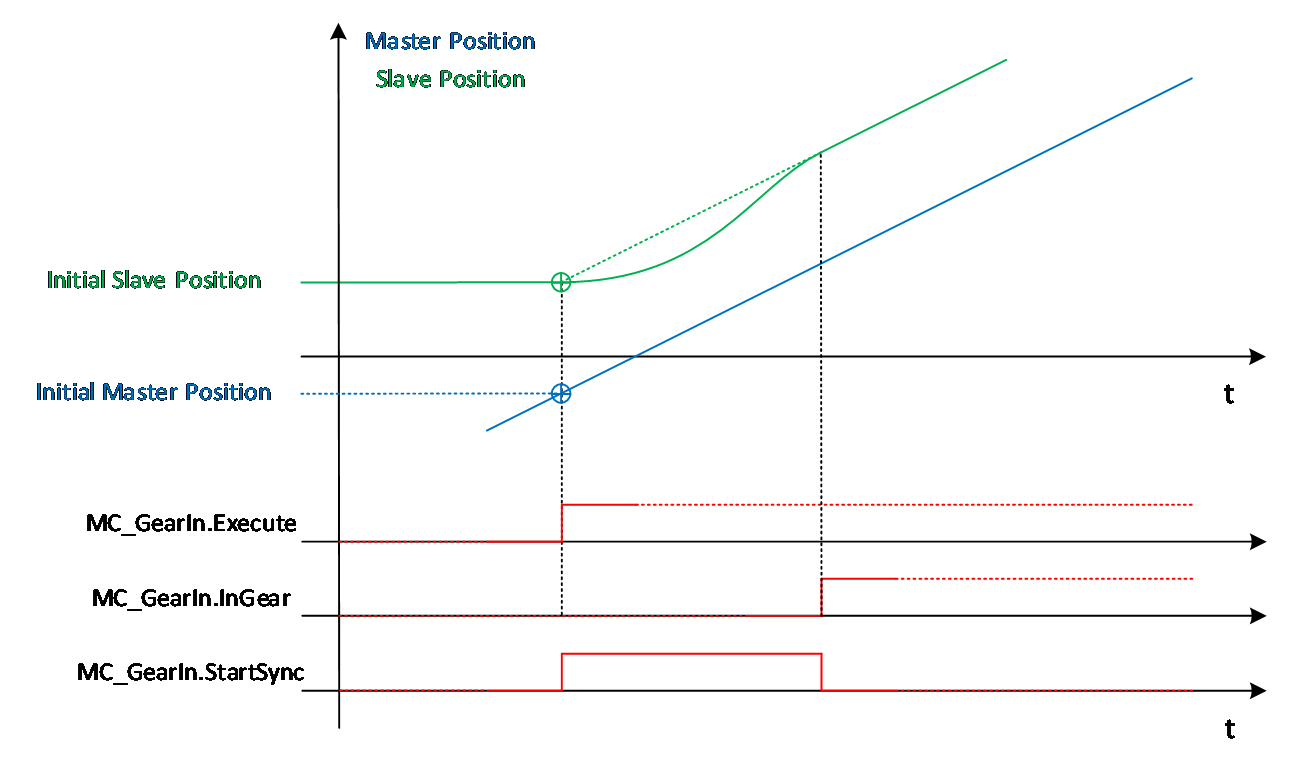
- Case 2: RampInMode = eProfileBased, CatchUp = FALSE
- Profile-based synchronization begins with a rising edge at MC_GearIn.Execute. In this case, MC_GearIn.StartSync is TRUE. As soon as the slave axis has reached the synchronous speed specified by RatioNumerator and RatioDenominator, it is synchronous. This makes MC_GearIn.InGear TRUE and MC_GearIn.StartSync FALSE. When and at which position the slave axis is synchronous depends on the specified parameters (RampInVelocity, RampInAcceleration, …). In any case, the profile-based synchronization results in a position offset compared to case 1 with RampInMode eDirect.
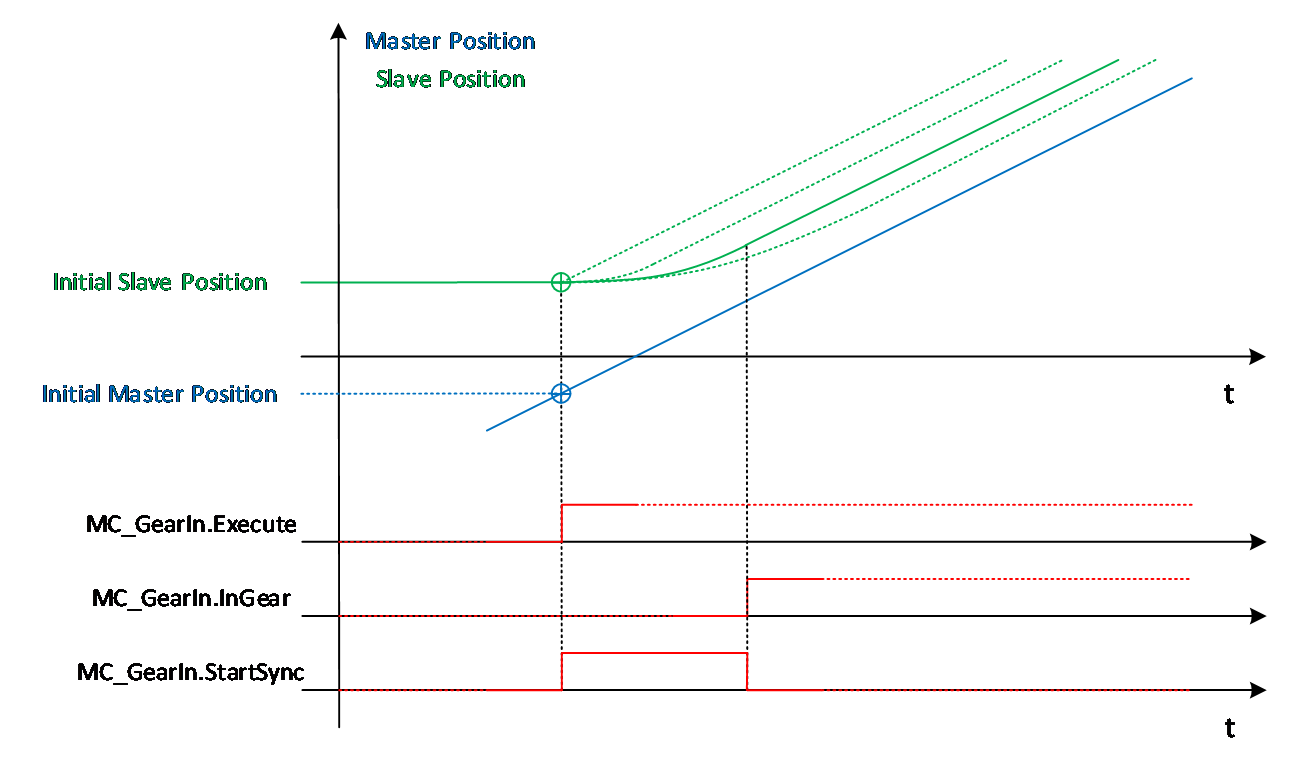
- Case 3: RampInMode = eProfileBased, CatchUp = TRUE
- Profile-based synchronization begins with a rising edge at MC_GearIn.Execute and MC_GearIn.StartSync TRUE. However, the transition profile calculated during synchronization is determined in such a way that it leads to the straight line from case 1 with RampInMode eDirect. This means that as soon as the slave axis has reached the synchronous speed specified by RatioNumerator and RatioDenominator, any offset caused by synchronization is also compensated. Then MC_GearIn.InGear becomes TRUE again and MC_GearIn.StartSync becomes FALSE. When and at which position the slave axis is synchronous depends on the specified parameters (RampInVelocity, RampInAcceleration, …). In any case, the slave axis ends up on the same straight line as in case 1 with RampInMode eDirect.