Positioning – XY energy-optimized
The software module offers the option of positioning the travel and lifting axes in an energy-optimized manner. To illustrate the functional principle, non-energy-optimized positioning (see chapter Positioning – absolute (400)) is compared with energy-optimized control below.
In both cases positioning starts when the respective dynamic parameters and the target position are specified and feed enable is set. The InPosition bit indicates when the target position is reached.
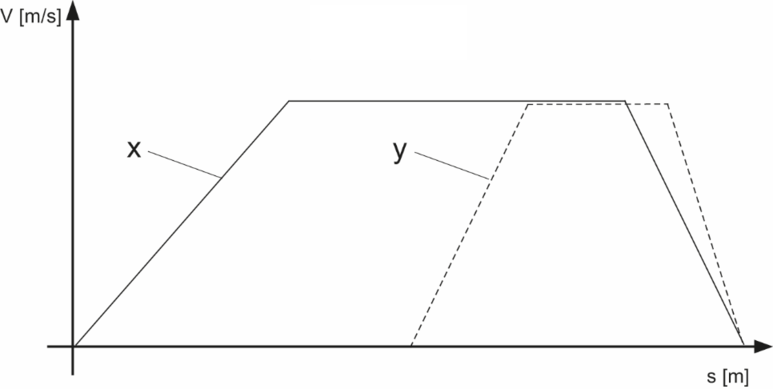
Positioning without energy optimization
In a storage/retrieval system that is not controlled in an energy-optimized manner, the travel and lifting axes are started at the same time. Both axes travel at maximum acceleration and maximum speed.
A large amount of energy is required to accelerate to maximum speed. The energy consumed increases with the square of the speed. Potential energy or recuperated energy is converted into heat in the braking resistor.
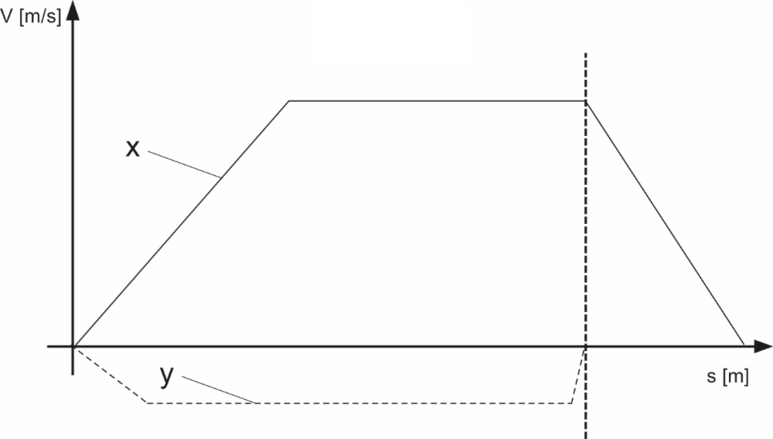
Energy-optimized control
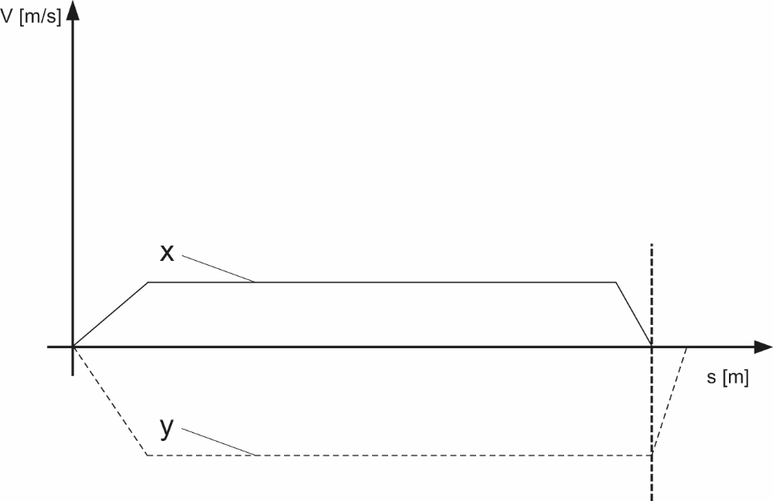
The software module coordinates the travel and lifting axes of an SRS in such a way that the energy balance is as favorable as possible. For this purpose, it tries to make the regenerative energy generated by one axis during the braking operation available to the second axis that is operating in motor mode. To do so, the speed, start time and braking time of the axes are adjusted without increasing the total time of the travel cycle.
The total time of a travel cycle is determined by the axis with the longest travel duration (master axis). The travel duration depends on the distance to be traveled and the maximum possible acceleration, deceleration, and speed of this axis.
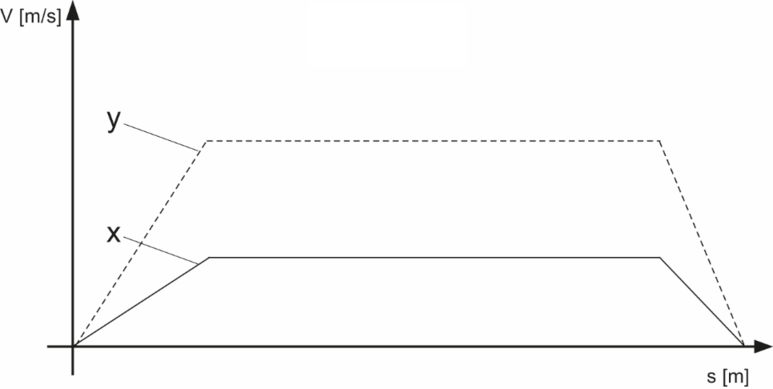
In contrast, the second axis takes less time to complete its travel order because it has a shorter distance to travel or a higher speed.
It is very rare that both axes need the same time to complete their travel order. In this case, no optimization is possible.