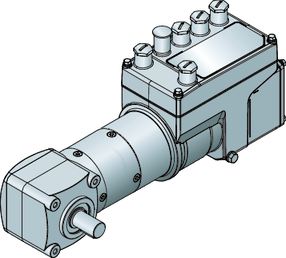
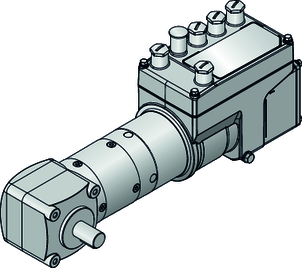
Reductores de ejes perpendiculares KNZ63.
El motorreductor de ejes perpendiculares del tipo KNZ63. DCA63.. tiene una posición de montaje compacta gracias a la combinación de las etapas angular y planetaria en una carcasa. El motorreductor tiene pares elevados porque la etapa de salida planetaria consta de 5 ruedas planetarias de dentado recto fabricadas en acero sinterizado endurecido. Con una etapa planetaria helicoidal preconectada, la etapa de engranaje angular está diseñada para optimizar el rodamiento. De este modo se mejora la suavidad de marcha. Gracias al elevado grado de rendimiento, el motorreductor de ejes perpendiculares no tiene autobloqueo.
La tabla siguiente ofrece una vista general de los tipos de versión.
Designación | |
|---|---|
KNZ..A | Eje macizo con chaveta |
La tabla siguiente muestra una vista general de los datos técnicos más importantes de las unidades de accionamiento MOVIMOT® performance ELV con reductor de ejes perpendiculares.
Unidad de accionamiento | KNZ63 DCA.. | ||
|---|---|---|---|
|
|
| |
Velocidad de salida nominal con ne = 4000 min-1 | na min-1 | 236 | 74 / 47 |
Par de salida continuo con ne = 1500 min-1 | Ma Nm | 8 | 22 |
Par de salida máximo | Mpk Nm | 20 | 56 |
Carga radial en el lado de salida con Ma con ne = 1500 min-1 | FRa N | 600 | 600 |
Transmisiones | i | 17 | 54 / 84.8 |
Grado de protección |
| IP 50 | |
Número de etapas | 2 | 3 | |
Holgura del reductor | <1.2° | <1.2° | |
L1 | mm | 15 | 15 |