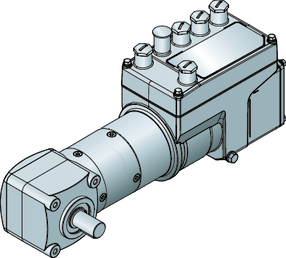
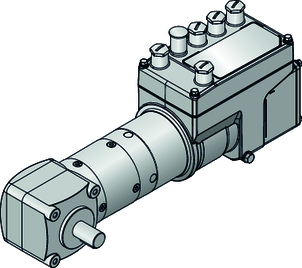
Redutor angular KNZ63.
O motorredutor angular do tipo KNZ63. DCA63.. possui uma forma construtiva compacta devido à combinação dos estágios angular e planetário em uma carcaça. O motorredutor tem altos torques, porque o estágio de saída planetário consiste em 5 engrenagens planetárias de dentes retos feitas de aço sinterizado endurecido. Com um estágio planetário helicoidal a montante, o estágio de engrenagem cônica é projetado para otimizar os rolamentos. Isso melhora a suavidade de deslocamento. Devido ao alto grau de rendimento, o motorredutor angular não é autotravante.
A tabela a seguir mostra uma visão geral dos tipos de versão.
Denominação | |
|---|---|
KNZ..A | Eixo maciço com chaveta |
A tabela a seguir fornece uma visão geral dos dados técnicos mais importantes das unidades de acionamento MOVIMOT® performance ELV com motorredutor angular.
Unidade de acionamento | KNZ63 DCA.. | ||
|---|---|---|---|
|
|
| |
Rotação de saída nominal em ne = 4000 min-1 | na min-1 | 236 | 74 / 47 |
Torque de saída contínuo em ne = 1500 min-1 | Ma Nm | 8 | 22 |
Pico de torque de saída | Mpk Nm | 20 | 56 |
Força radial no lado de saída em Ma em ne = 1500 min-1 | FRa N | 600 | 600 |
Reduções do redutor | i | 17 | 54 / 84.8 |
Grau de proteção | IP 50 | ||
Número de estágios | 2 | 3 | |
Folga do redutor | <1.2° | <1.2° | |
L1 | mm | 15 | 15 |