Positive encoder coupling
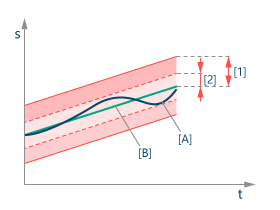
If the coupling of the external encoder to the motor encoder is positive, monitoring can be carried out solely by the absolute error window [1] and the absolute warning window [2]. These windows should be larger than the sum of encoder noise, slack and spring movements.
Error monitoring forms the distance between the motor encoder [B] and the external encoder [A] and compares this with the warning window [red dashed line] and the error window [red line]. An error or warning is triggered if this is exceeded.
This current distance between the motor encoder and external encoder (lrErrorDistance or lrWarningDistance) is usually reset and incrementally totaled after the MOVI-C® CONTROLLER is started up.
