Design and operating principle
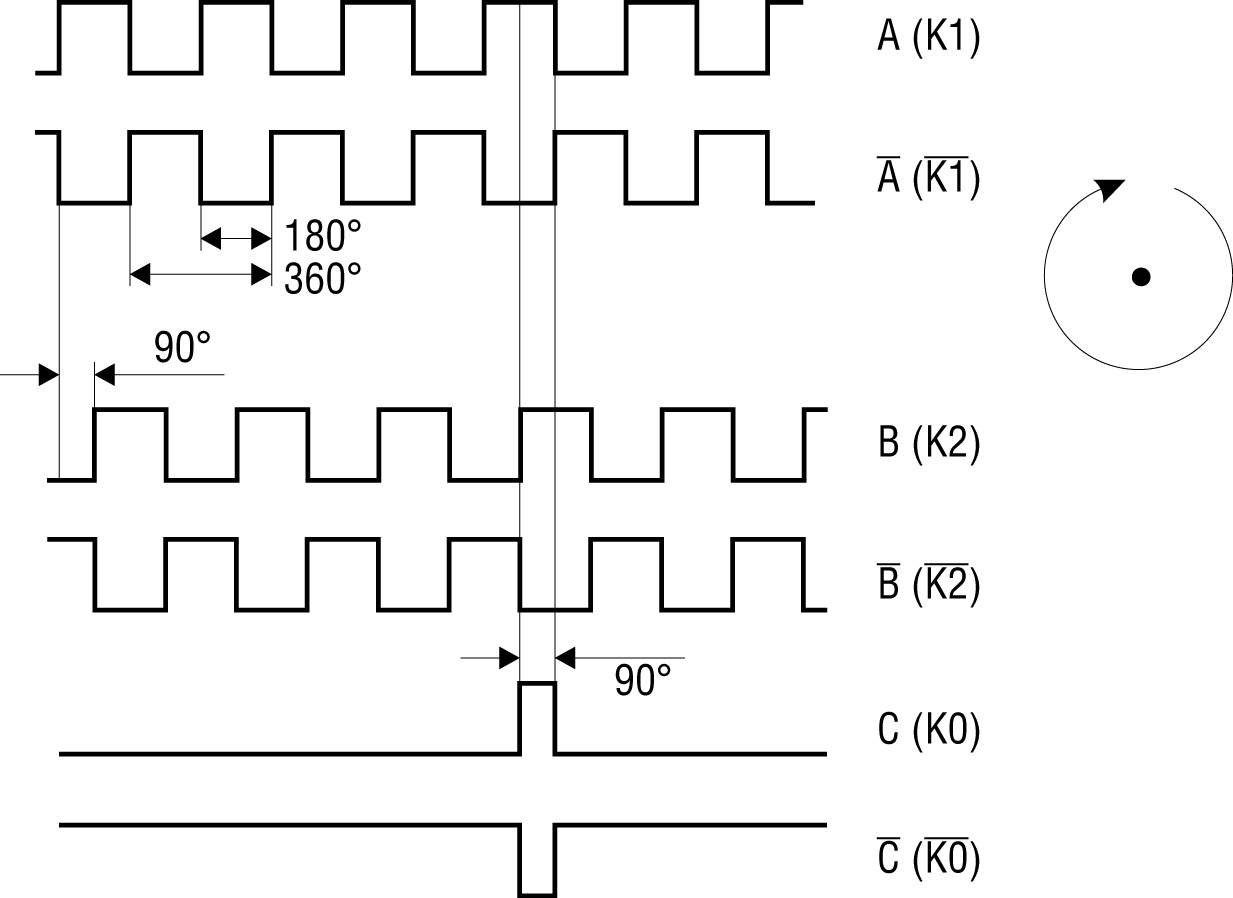
Incremental encoders normally have 2 tracks and a zero pulse track. Inverting the signals results in a total of 6 tracks. Two scanning elements in the incremental encoder, which are offset by 90°, deliver two signal tracks, A (K1) and B (K2). Track A (K1) is 90° ahead of track B (K2) when looking at the motor shaft. This phase shift is used to determine the motor's direction of rotation. The zero pulse (one pulse per revolution) is registered by a third scanning unit and made available on track C (K0) as a reference signal.
The signals A (K1), B (K2), and C (K0) are inverted in the encoder and provided as signals A (K1), B (K2), and C (K0).