Kompatibilität der Steuerungssoftware beim Verwenden des MOVIKIT® Robotics addon LargeModels
Problem
Nach einem Update oder Downgrade der Version des Softwaremoduls läuft das Projekt nicht mehr korrekt an: Die Ausgangsvariable xInitDone bleibt auf "FALSE", es besteht keine Verbindung im RobotMonitor und folgende Fehlermeldungen werden im Log angezeigt:

Abhilfe
Zum Kombinieren des MOVIKIT® Robotics mit dem MOVIKIT® Robotics add-on LargeModel muss die Schnittstelle zwischen den beiden Softwaremodulen einheitlich konfiguriert sein. Dies können Sie durch Umstellen des Platzhalter der Bibliothek "RobotKinematicModel Interfaces" erreichen. Gehen Sie dazu wie folgt vor:
- Sehen Sie im Bibliotheksmanager in der Bibliotheksstruktur des MOVIKIT® Robotics nach, welche Version der Bibliothek im Platzhalter eingestellt werden muss.
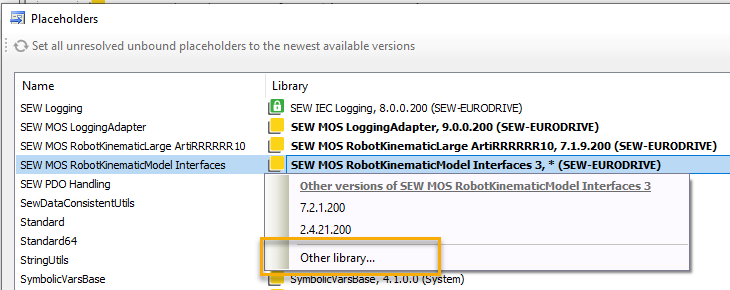
- Öffnen Sie den Platzhalter-Dialog und wählen Sie die ermittelte Bibliothek mit der korrekten Ziffer am Ende des Bibliotheksnamens, indem Sie zu der Bibliothek navigieren (Pfad: Application > SEW‑EURODRIVE > MOS > Robot > SEW MOS RobotKinematicModels N).
- Wenn der IEC-Editor nicht selbst erkennt, dass das Projekt neu übersetzt werden muss, muss das Übersetzen über [Übersetzen] > [Alles bereinigen] erzwungen werden, damit die Änderung wirksam wird.
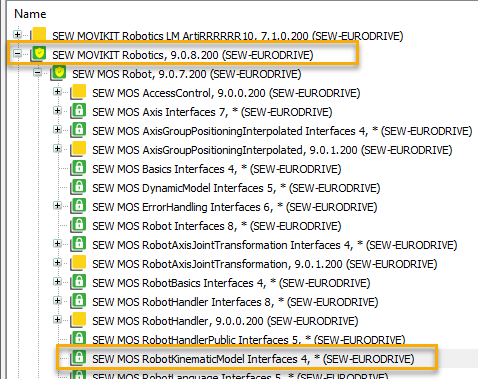

- Stimmt die Bibliothek im MOVIKIT® Robotics mit dem Platzhalter überein (in den Screenshots also die Variante mit der Ziffer "4" hinten), ist die Software betriebsbereit.
