Pick-And-Place-Programm erstellen
Beim Erstellen eines neuen Programms ist die Option [Create pick and place program] verfügbar. Die Option ermöglicht das Erstellen eines Pick-and-Place-Programms mittels eines Dialogfensters, in dem das Programm parametriert werden kann.
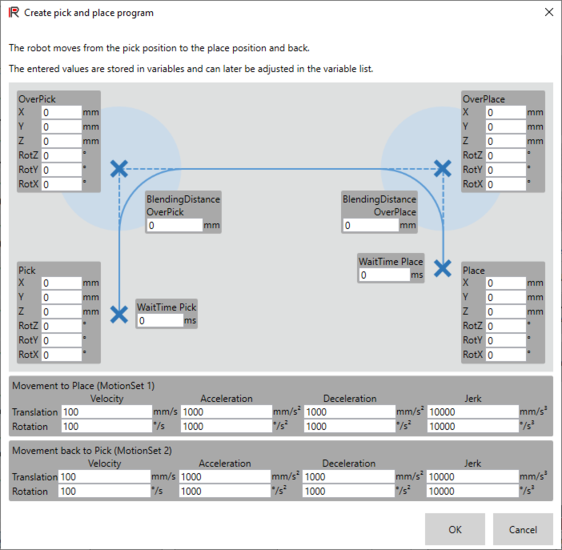
Nach Bestätigen des Dialogfensters mit [OK], wird das Pick-And-Place-Programm automatisch erzeugt und auf den gerade angezeigten Programmslot des MOVI-C® CONTROLLER übertragen. Dabei werden Robotervariablen entsprechend benannt, mit den vorgegebenen Werten belegt und auf den MOVI-C® CONTROLLER übertragen. Das Arbeiten mit Robotervariablen ermöglicht das Wiederverwenden dieser Variablen an anderer Stelle. Außerdem kann auf die Robotervariablen von außen zugegriffen und so das Programm beeinflusst werden (z. B. aus dem IEC-Anwenderprogramm oder über die Feldbusschnittstelle von einer übergeordneten Steuerung). Für das Pick-And-Place-Programm werden automatisch die nächsten freien Robotervariablen verwendet und keine bereits verwendeten Robotervariablen überschrieben. Das Programm und die Robotervariablen können bei Bedarf anschließend wie gewohnt im RobotMonitor geändert werden. Bei erneutem Öffnen des Dialogfensters werden die aktuellen Werte der entsprechenden Robotervariablen angezeigt. Dies ermöglicht ein bidirektionales Arbeiten, d. h. geänderte Werte im Dialogfenster oder im RobotMonitor werden auf der Gegenseite entsprechend aktualisiert.
Das erzeigte Pick-And-Place-Programm hat folgenden Ablauf:
- MotionSet zur Fahrt nach "Place" anwählen.
- Fahre zur Pose "OverPick".
- Fahre zur Pose "OverPlace".
- Fahre zur Pose "Place.
- Warte die eingestellte Zeit "WaitTime Place".
- MotionSet zur Fahrt nach "Pick" anwählen.
- Fahre zurück zur Pose "Pick" (über die Zwischenpunkte "OverPlace" und "OverPick").
- Warte die eingestellte Zeit "WaitTime Pick".
- Programm ist beendet.
Für die Ecken der Bahn, also bei den Posen "OverPick" und "OverPlace", kann im Dialogfenster die gewünschte Überschleifdistanz parametriert werden. Für die Bewegung zur "Place"-Pose und die Bewegung zur "Pick"-Pose können jeweils unterschiedliche Bewegungsparameter eingestellt werden, z. B. um mit gegriffenem Objekt langsamer zu fahren als ohne. Die eingestellten Geschwindigkeits-, Beschleunigungs- Verzögerungs-, und Ruckwerte werden in den angezeigten MotionSets hinterlegt.
Das erzeugte Programm kann zudem bei Bedarf z. B. um eine Schleife um den Ablauf oder weitere Zwischenpunkte erweitert werden. Wird das Dialogfenster erneut durchlaufen und das gerade angezeigte Programm ist nicht leer, erscheint eine Abfrage, ob das Programm überschrieben werden soll oder das evtl. erweiterte Programm erhalten bleiben soll und nur die im Dialog geänderten Werte in den Variablen aktualisiert werden sollen.
