Process description
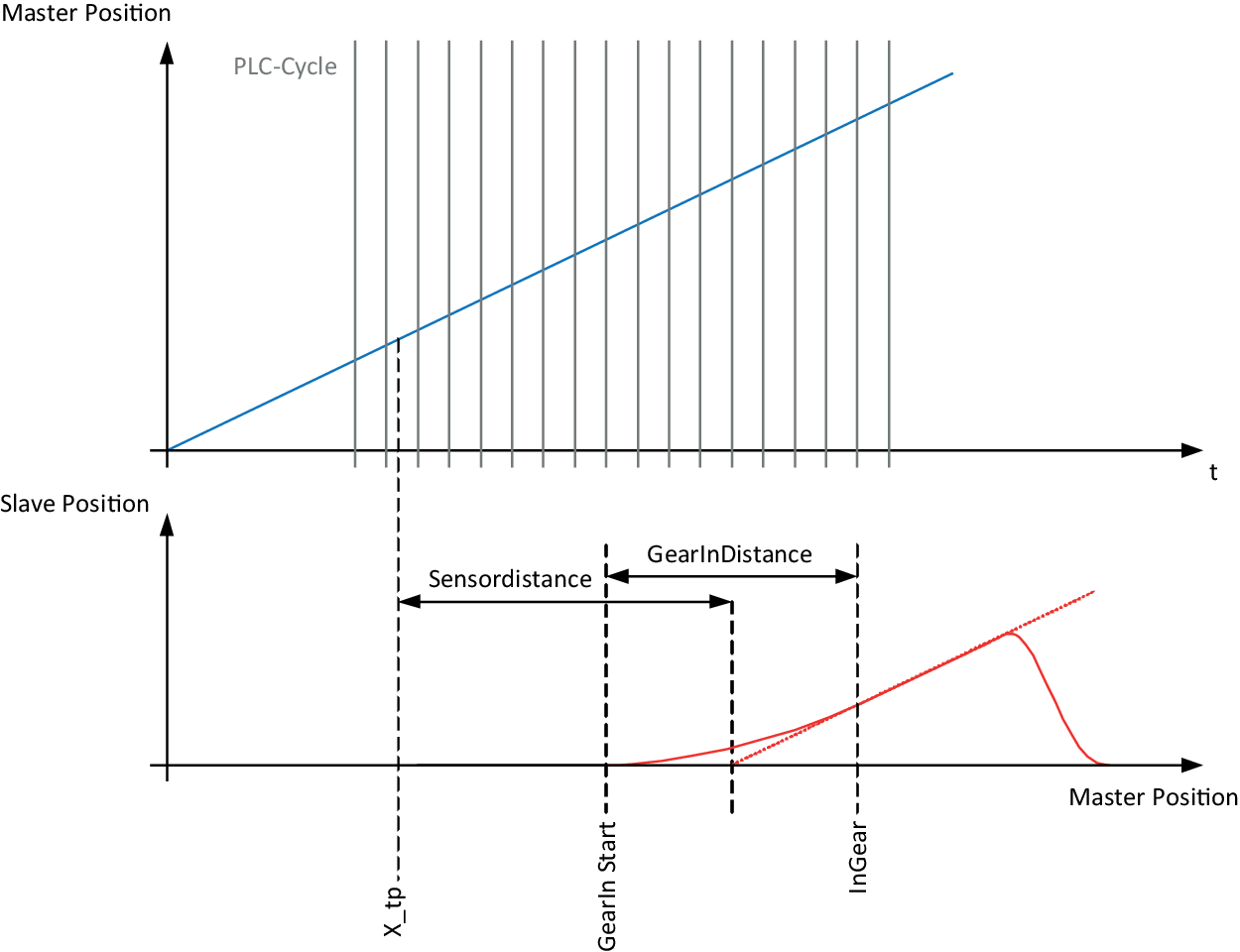
As soon as there is a sensor signal present, the current master position (X_tp) is detected and used together with the specified sensor distance (Sensordistance) to calculate the reference position (GearInReferencePosition). The reference position is the mater position at which the detected cut mark reaches the start position of the saw. The saw starts at half of the synchronization distance (GearInDistance) before the reference position to be synchronous after the synchronization distance (InGear). To be able to start at the right time, the sensor distance must be greater than half of the synchronization distance. The following figure shows this process.