Prozessbeschreibung
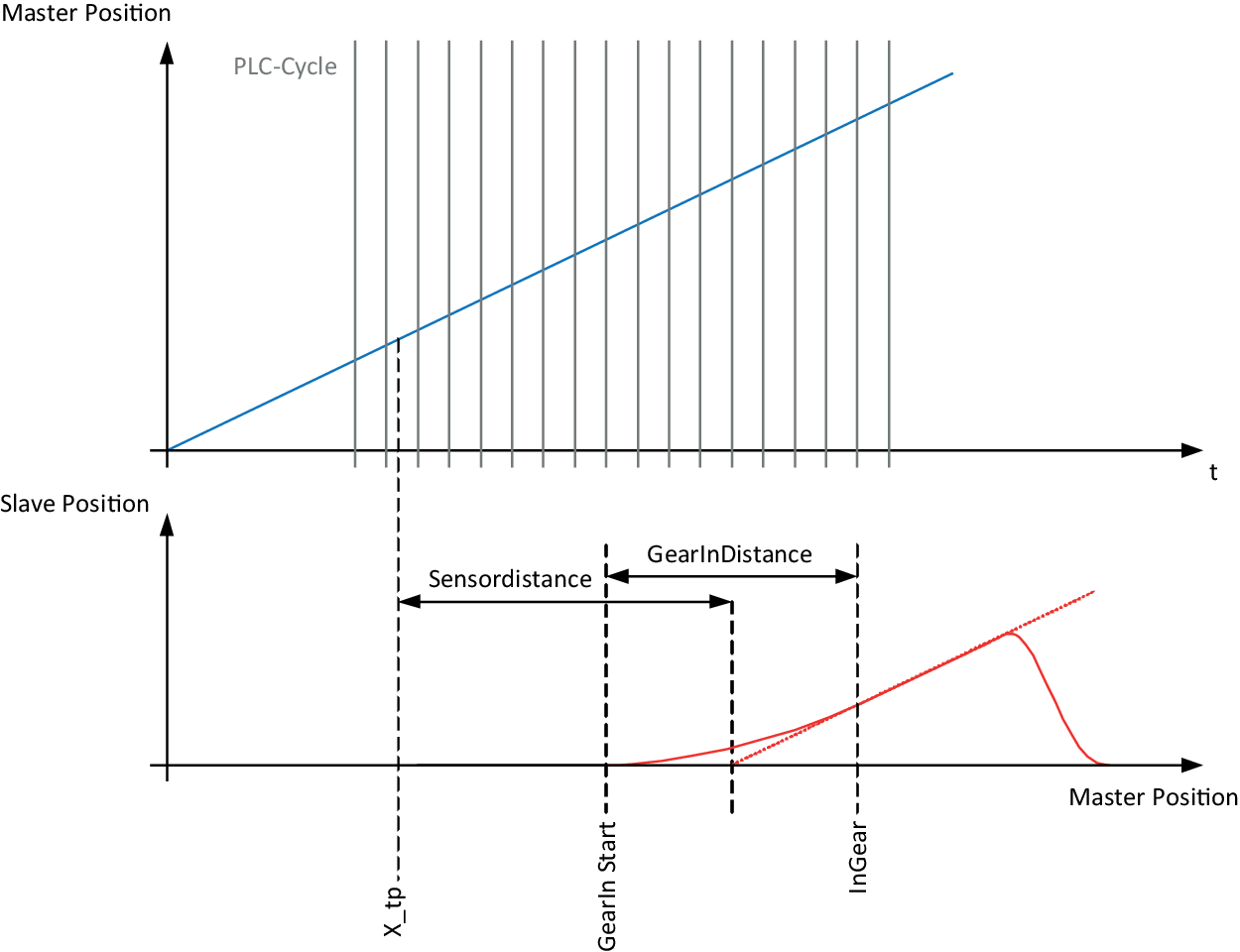
Sobald ein Sensorsignal vorliegt, wird die aktuelle Masterposition (X_tp) erfasst und zusammen mit dem vorgegebenen Sensorabstand (Sensordistance) zur Berechnung der Referenzposition (GearInReferencePosition) verwendet. Die Referenzposition ist die Masterposition, an welcher die erfasste Schnittmarke die Startposition der Säge erreicht. Die Säge startet um die Hälfte des Einkuppelwegs (GearInDistance) vor der Referenzposition, um nach dem Einkuppelweg synchron zu sein (InGear). Um rechtzeitig starten zu können muss der Sensorabstand größer als die Hälfte des Einkuppelwegs sein. Folgende Abbildung veranschaulicht diesen Prozess.