Horizontal drive with differential drive module
The following example shows how the methods are implemented for a horizontal drive with differential drive module.
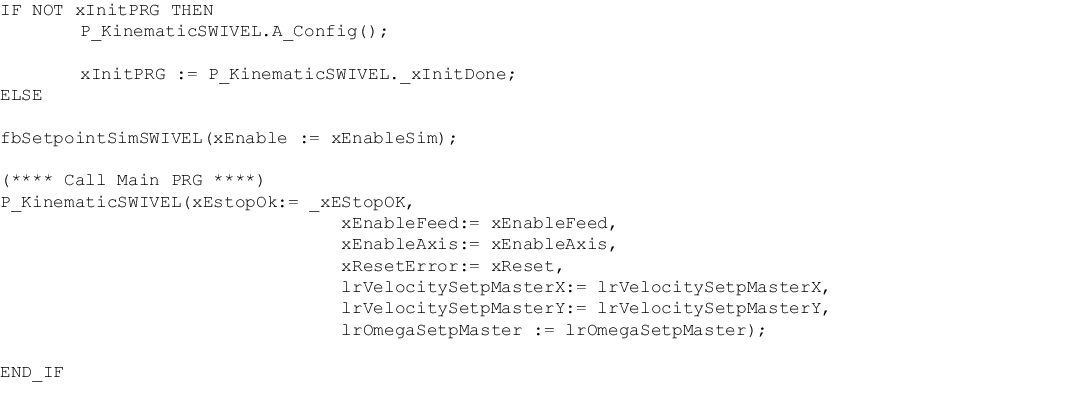
Kinematics program: P_KinematikDIFF
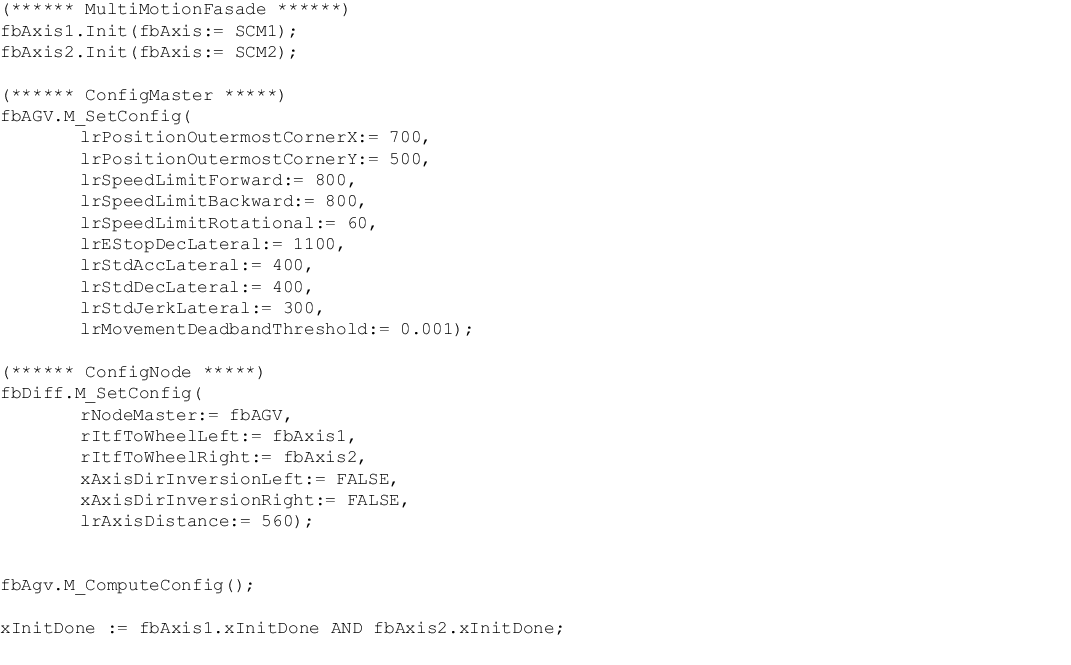
Initialization action: A_Config
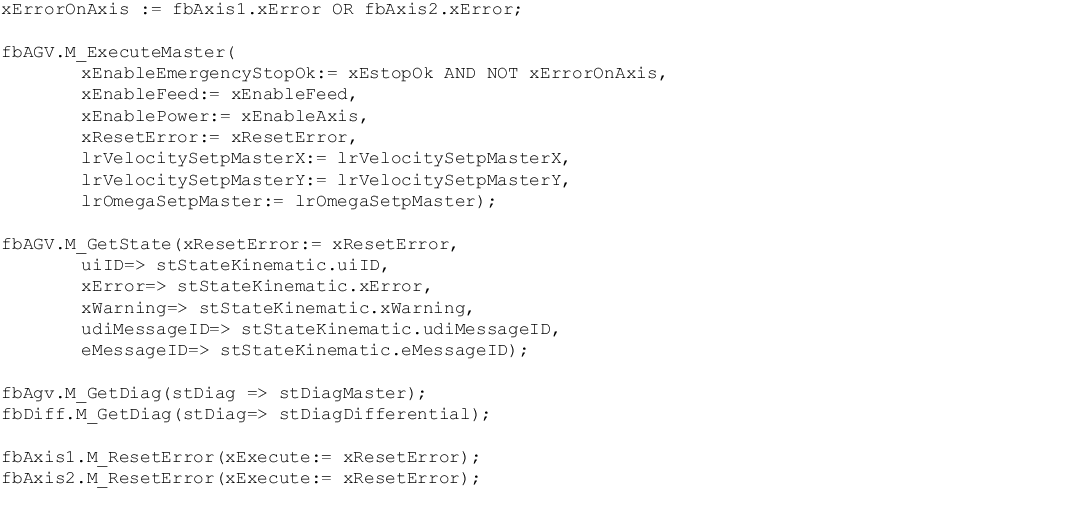
Free-running code: P_KinematikDIFF