Main program
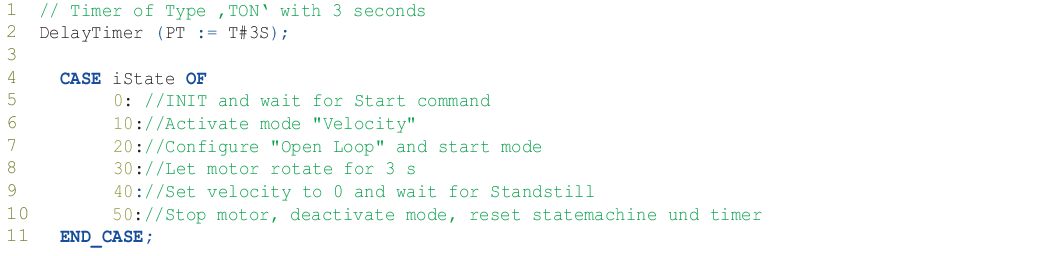
- Define a state machine in the implementation.
- Initialization: When the start command is set, the state changes to 10.
- Activate the "Velocity" mode.
- Select the "Open loop" operating behavior and start the mode.
- Let the motor rotate for 3 seconds.
- Set the speed to 0. When the motor is at standstill, the state changes to 50.
- Stop the motor, deactivate the mode and reset the timer and the state machine.






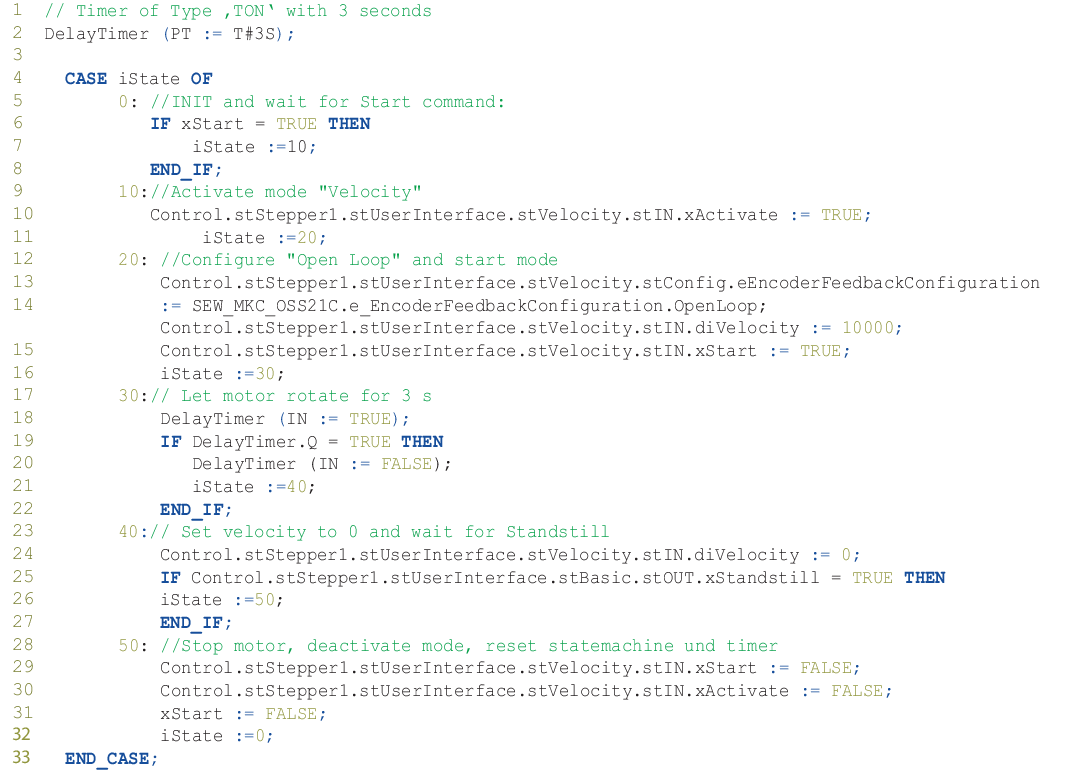
- The complete program looks like this: