Funktionsweise
Beim Absenken größerer Massen z. B. in Regalbediengeräten, wird viel potentielle Energie frei. Ohne das Anpassen des Sollwertes für den Ladezustand, würde der angeschlossene Energiespeicher durch das angeschlossene Versorgungsmodul auf einen sehr hohen Wert vorgeladen werden. Dadurch wird verhindert, regenerative Energie aus den sich absenkenden Hubachsen aufzunehmen.
Um den Energiespeicher bei Fahrbewegungen nach oben zu entlasten, passt die Funktion "Höhenabhängige Laderegelung" den Sollwert des Energiespeichers dynamisch anhand der aktuellen Position der Hubachse an:
- Fährt die Hubachse nach oben, wird der Ladezustandssollwert sukzessive verringert, damit im Energiespeicher Kapazitäten zur Aufnahme der sich wieder ergebenden Rekuperationsenergie bereitgehalten werden.
- Fährt die Hubachse nach unten, wird der Ladezustandssollwert wieder erhöht, bis er an einem definierten Nullpunkt wieder den ursprünglichen "stationären" Sollwert erreicht.
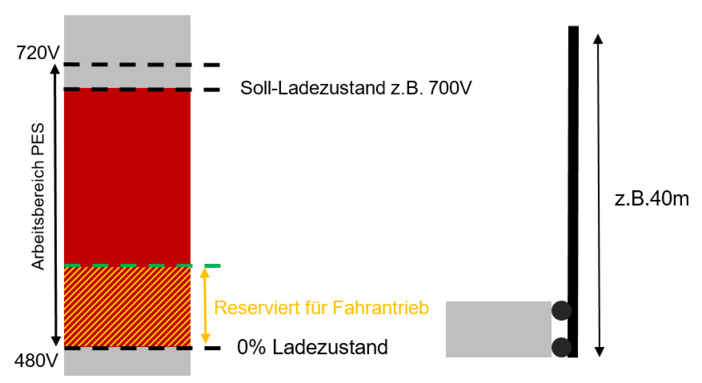
In folgendem Beispiel beträgt die maximal anfahrbare Höhe des Hubwerks 40 m (Parameter "Oberste Position Hubwerk"), die Nullposition und damit die niedrigste Position 0 m (Parameter "Niedrigste Position Hubwerk").
Der Arbeitsbereich des Power And Energy Solutions Systems ist zwischen 720 V und 480 V festgelegt. Der stationäre Ladezustands-Sollwert, parametriert über den Parameter "Soll-Ladeniveau" der Betriebsart "Automatik" beträgt 700 V.
Das Hubwerk steht an seiner definierten Nullposition. Der aktuelle Sollwert ist daher der stationäre Sollwert von 700 V, da keine Rekuperations-Energie zu erwarten ist.
Das Hubwerk wird nun an seine maximale Höhe von 40 m verfahren. Der Soll-Ladezustand ist nun soweit verringert worden, bis er den Wert des durch den Parameter "Reserve für weitere Antriebe" vorgegebenen Reserveladezustands erreicht. Dadurch ist noch Restladung im Speicher, die von weiteren Antrieben genutzt werden kann, falls die Einspeiseleistung niedriger als die Leistung ist, die gerade von den Antrieben benötigt wird.
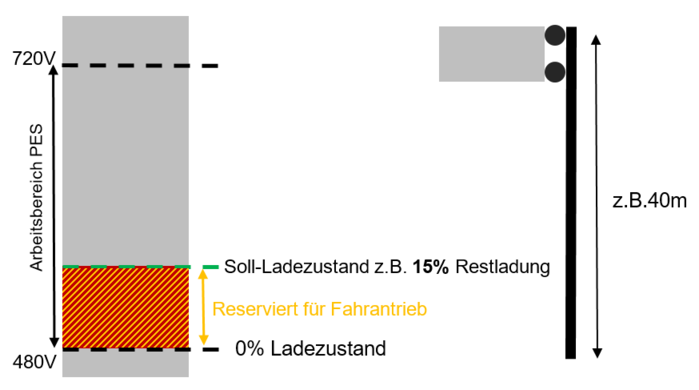
Zwischen diesen beiden Ladezustandsniveaus wird nun energetisch interpoliert, d. h. für Positionen zwischen Nullposition und maximaler Position wird ein Ladezustandssollwert ausgegeben, der der Energie zwischen diesen beiden Niveaus entspricht.
Folgende Abbildung zeigt einen Fahrvorgang eines Regalbediengeräts. Das Hubwerk wird von 0 m auf ca. 21.8 m verfahren und am Ende des Fahrvorgangs wieder abgesenkt. Der Ladezustandssollwert wird dabei zwischen ca. 650 V und 525 V dynamisch anhand der Positionsinformation der Achse verändert.

