Code-Beispiel: Ein Transportband
HINWEIS

Folgendes Beispiel kann im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py].
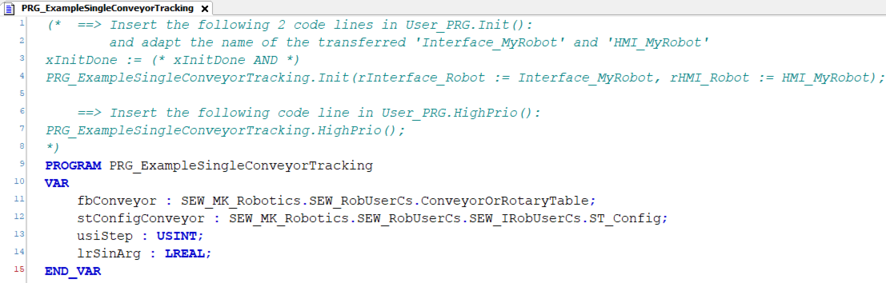
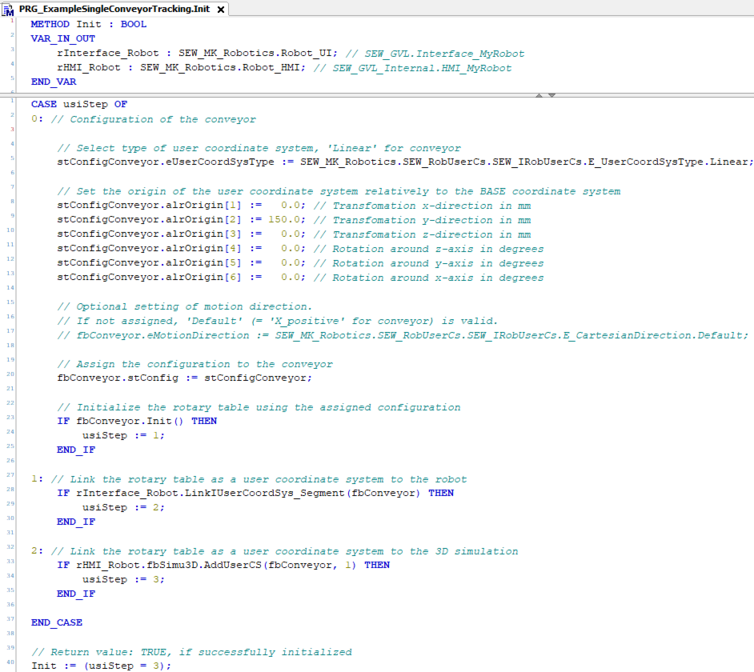
In der Methode PRG_ExampleSingleConveyorTracking.Init() wird das Transportband parametriert.
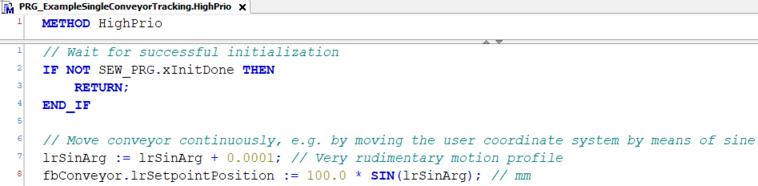
In der Methode PRG_ExampleSingleConveyorTracking.HighPrio() wird der Positionsverlauf des Transportbands dem Baustein fbConveyor zyklisch zugewiesen.
Die beiden Methoden sind in den Aktionen USER_PRG.Init() und USER_PRG.HighPrio() aufzurufen und dabei ist der vom Anwender in MOVISUITE® vergebene Name des Roboterknotens (z. B. MyRobot) zu übergeben.
User_PRG.Init()
xInitDone := (* xInitDone AND *)
PRG_ExampleSingleConveyorTracking.Init(
rInterface_Robot := Interface_MyRobot,rHMI_Robot := HMI_MyRobot
);
User_PRG.HighPrio()
PRG_ExampleSingleConveyorTracking.HighPrio(
Wenn in der Aktion USER_PRG.Init() weitere Init()-Signale gebildet werden, müssen diese alle verknüpft werden.