Module description
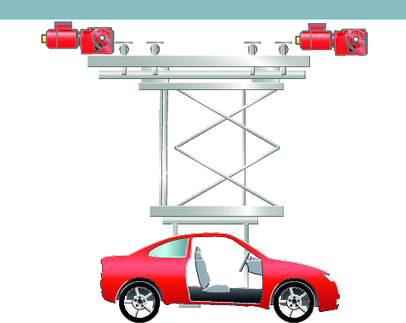
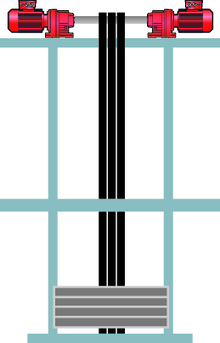
The MOVIKIT® MultiAxisController is a software module for MOVI-C® CONTROLLER for implementing mechanically coupled drives (loose or rigid coupling). The coupling can be permanent via the mechanical construction (connection via shafts, lift trucks, portals, wheel/rail) or temporary via the product (extruder, sheet unwinding from coil). The coupling can also comprise multiple drives.
The core function of the software module is that several drives are driving a single load together. The drives are matched to each other in such a way that no vibrations occur that could lead to a system failure. Typical master/slave connections are not suitable for this application case or are manageable only with expert knowledge. The software module breaks up this master/slave arrangement and handles each drive at the same level. This eliminates the dead times associated with the master-slave arrangement and provides greater dynamics.
|
|
As the software module operates as a function within an axis group, the following functions are easily implemented:
- Processing multi-axis limit switches
- Multi-axis reference travel
- Multi-axis jog mode
- Multi-axis error handling
- Multi-axis alignment after an error
These functions are a component of the software module and do not have to be reprogrammed with every application. This saves time during startup.
Furthermore, the software module offers the following functions:
- Load distribution
- Load distribution is intended for applications where the load is to be distributed unevenly among the participants. This can be dynamic wheel pressure caused by mass acceleration or static wheel pressure due to differing load. The distribution can be dynamically modified. The advantage can be greater acceleration, for example, which in turn reduces the cycle time.
- Anti-slip control
- This increases system availability in the wheel/rail drive mode. A slip of the drive wheel can cause the system to shut down; in a worst case scenario, a wheel or the rail can be damaged. This can be caused by dirt or an oily spot on the rail. Anti-slip control detects the slip, limits it at a threshold that can be parameterized, and sets the respective bit to indicate the slip to the user. Once the wheel has regained traction, the drive continues to run without damaging the mechanical systems.
- Electronic differential
- The electronic differential is used when a mobile system is to travel around the curve. In this case, one drive increases its speed while another drive reduces its speed. The software module maintains the system at an average speed.
The software module offers the following operating modes for mapping the various applications:
- "Skew priority" operating mode
- This operating mode is for applications in which skews or misalignments of the structure lead to problems. This can cause faulty positioning or overload with subsequent shutdown.
- Application examples include indoor cranes, parallel feeds, SRS hoists, and dual-column hoists.
- "Torque priority" operating mode
- This operating mode is for applications in which torque control is of prime importance. An important control task here is to allow slip up to a parameterizable value while limiting maximum slip (anti-slip control).
- In addition, it can occur that not all drives travel the same distance depending on their position. This is the case, for example, during travel along a curve. For this reason, the software module was expanded to include an electronic differential with disabling function.
- There is also integrated load distribution for dynamically distributing torque to the individual drives that can be configured via process data. Using this function, drives can also be deliberately tensioned against one another to eliminate clearance, for example.
- It is also possible to compensate for diameter errors.
- Application examples include traction-optimized vehicles, SRS travel drives, SRS units with cornering ability (in preparation), fail-safe and redundant drive systems, slippery or poor-quality tracks, and indexing tables.
The software module can be used in combination with other MOVIKIT® software modules, for example for a double trolley in a storage/retrieval system.
The software module can also be used nested in both operating modes. An example of this is a gantry crane that has multiple drives on the right and on the left. In this case, the "Skew priority" operating mode would control the gantry, and subordinate groups – one each to the right and to the left – would use the "Torque priority" operating mode.
The software module offers the following advantages:
- Implementation of the individual functions of "Multi-motor drive", "Group drive", and "Synchronous applications" using a single technological function.
- Uniform distribution of the drive task to the drives by means of a coupling without a master/slave relationship.
- Implementation of applications using a fluctuating master/slave relationship.
- Greater dynamics due to the elimination of the master/slave relationship.
- No dead time due to a delayed start of the slaves.
The range of functions of the software modules can also be expanded using add-ons. For further information, refer to chapter Add-ons.
