Utilização da função DynaStop® em combinação com a função STO
Para poder usar a função DynaStop® em conjunto com a função STO, a SEW-EURODRIVE recomenda o controle com a função de segurança SS1-t.
Deste modo o parâmetro Comportamento durante a parada deve ser = "Freio fechado/acionamento não recebe corrente" (caminho: Funções > Funções de acionamento > FCB02 Parada padrão).
A tabela a seguir mostra o comportamento da função DynaStop® dependendo do ajuste de parâmetros:
Índice | Parâmetro | Ajuste | Significado |
|---|---|---|---|
8563.1 | Comportamento durante a parada (Caminho: Funções > Funções de acionamento > FCB02 Parada padrão) | Acionamento energizado (freio aberto/ | Quando os sinais de liberação forem removidos, o acionamento desacelera com o valor nominal de desaceleração ativo. Ao atingir a rotação "0", a DynaStop® não é ativada. O controle de retenção de posição no modo está ativo. |
Acionamento não recebe corrente (freio fechado/DynaStop® ativada) | Quando os sinais de liberação forem removidos, o acionamento desacelera no valor nominal de desaceleração ativo. A DynaStop® é ativada quando a velocidade de rotação "0" é atingida. O motor está sem corrente. | ||
8501.3 | No STO, fechar freio/ativar DynaStop® (Caminho: Funções > Funções de acionamento > FCB01 Bloqueio do estágio de saída > Freio/DynaStop®) | 0 (Não) | Ao ativar o STO, o estado da DynaStop® permanece inalterado. |
1 (Sim) | A DynaStop® não é ativada de maneira relacionada à segurança ao ativar o STO. Informação: Observar a faixa de operação permitida da função DynaStop®. |
Configuração necessária | ||
Ajuste recomendado |
A figura a seguir representa a utilização da função DynaStop® em combinação com função STO e controle de acordo com SS1-t:
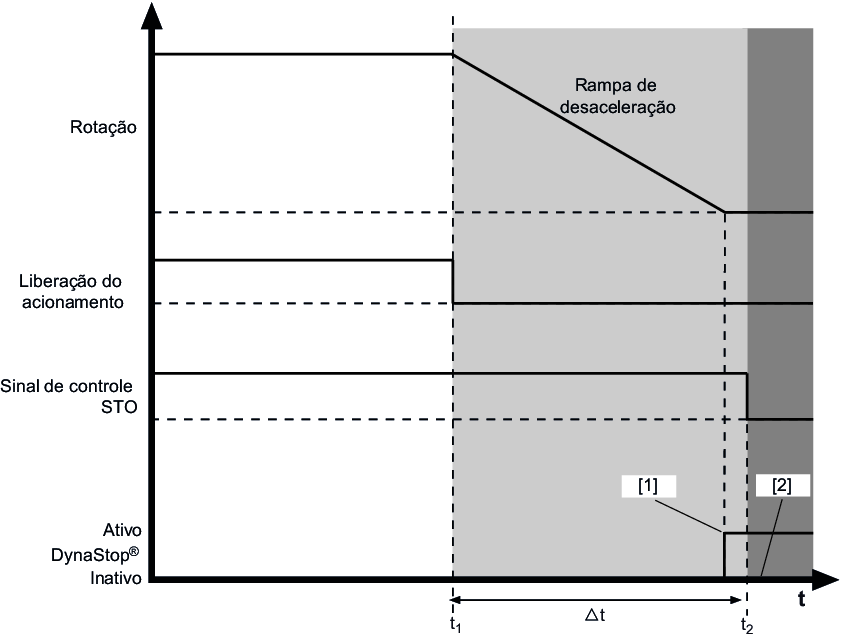
[1] | Parâmetro: Comportamento durante parada = "Acionamento não recebe corrente (freio fechado/DynaStop® ativada)" (ajuste de fábrica) | |
[2] | Parâmetro: Comportamento durante parada = "Acionamento com corrente (freio aberto/DynaStop® desativada)" (Caminho: Funções > Funções de acionamento > FCB02 Parada padrão) | |
t | Tempo | |
t1 | Momento em que a rampa de desaceleração é iniciada | |
t2 | Momento em que STO está ativado | |
Δt | Intervalo de tempo entre o início da rampa de desaceleração e o STO | |
Faixa do tempo de atraso seguro | ||
Área com função STO ativada |
