Einleitung
Zur Schwingungsreduktion kann oben am Mast des Regalbediengeräts ein weiterer Antrieb eingesetzt werden. Dieser Antrieb wird als Kopfantrieb bezeichnet. Häufige Anwendung finden Kopfantriebe in Leichtbau-Regalbediengeräten, besonders hohen Regalbediengeräten und Retrofits.
Aufbau
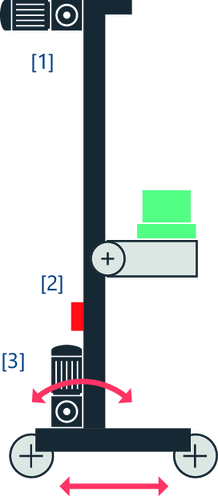
[1] | Kopfantrieb |
[2] | Dehnungsmesstreifen |
[3] | Unterer Fahrantrieb |
Funktionsweise
Zur Ermittlung der Auslenkung des Mastes wird der Messwert eines Dehnungsmessstreifen über die Analogwertkarte des Kopfantriebs eingelesen. Der Umrichter am Kopfantrieb nimmt die Skalierung des Analogwertes vor. Der skalierte Analogwert wird im MOVI-C® CONTROLLER des MOVIKIT® StackerCrane MultiAxisController in einen Ausgleichswert zur Reduktion der Schwingung umgerechnet. Daraus abgeleitet werden anschließend entsprechende Sollwerte für die Achsen generiert. Durch dieses Vorgehen können auch sehr hohe und schlanke Regalbediengeräte präzise und schnell positioniert werden.
