Overlapping of the Velocity and PositioningRelative operating modes
The following application example illustrates how you can activate multiple operating modes simultaneously ("Velocity" operating mode and "Positioning Relative" operating mode). This allows you to overlap motion profiles.
Control
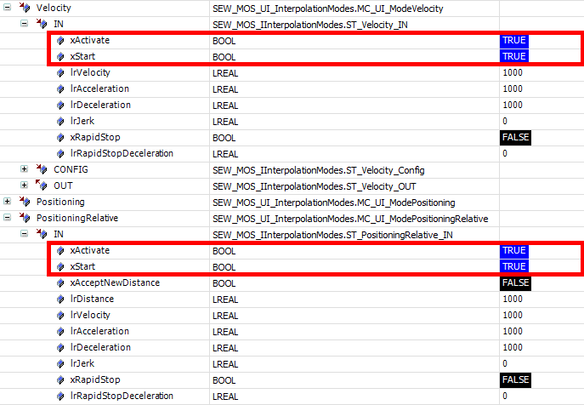
Control the axis in the Velocity structure as follows:
- To activate the operating mode, set xActivate to "TRUE".
- Define the setpoints for lrVelocity, lrAcceleration, lrDeceleration, and lrJerk.
- To start the operating mode, set xStart to "TRUE".
Control the axis in the PositioningRelative structure as follows:
- To activate the operating mode, set xActivate to "TRUE".
- Define the setpoints for lrDistance, lrVelocity, lrAcceleration, lrDeceleration, and lrJerk.
- To start the operating mode, set xStart to "TRUE".
Interface in the IEC Editor
Trace recording

[1] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.In.xActivate |
[2] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.In.xStart |
[3] | SEW_GVL.Interface_Axis2.ProfileGeneration.PositioningRelative.In.xActivate |
[4] | SEW_GVL.Interface_Axis2.ProfileGeneration.PositioningRelative.In.xStart |
[5] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[6] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[7] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[8] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.Out.xInVelocity |
[9] | SEW_GVL.Interface_Axis2.ProfileGeneration.PositioningRelative.Out.xInPosition |
Note:
As can be seen in the speed profile, in particular, the "PositioningRelative" operating mode overlaps with the "Velocity" operating mode in the area between Cursor1 and Cursor2.
