Stopping at an absolute position
The following application example illustrates how, in "Velocity" operating mode, you can control the profile generation such that the movement always stops at the same absolute position.
Control
Control the axis in the Velocity structure as follows:
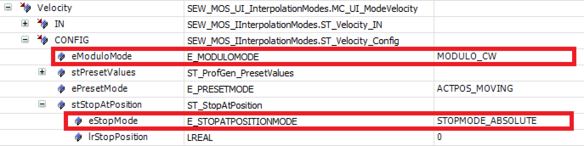
- Set eModuloMode to a modulo travel strategy of MODULO_CW.
- Set eStopMode to STOPMODE_ABSOLUTE.
- For lrStopPosition, enter the desired absolute stop position (in this example: 0).
Interface in the IEC Editor
Trace recording

[1] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.In.xActivate |
[2] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.In.xStart |
[3] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[4] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[5] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[6] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.Out.xInVelocity |
[7] | SEW_GVL.Interface_Axis2.ProfileGeneration.Velocity.Out.xStopped |
Note:
The setpoint profile shows that the movement does not stop immediately with the falling edge at xStart. Deceleration is delayed so that the movement stops at the configured position, which in this case is the zero position.
