Simple movement with modulo axis
The following application example illustrates how, in "Velocity" operating mode, you can use the user interface to easily move a modulo axis.
Control
Control the axis in the Velocity structure as follows:
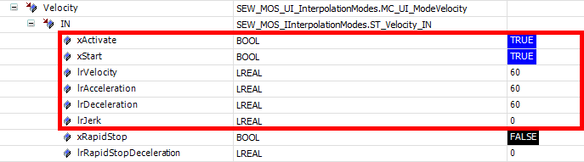
- To activate the operating mode, set xActivate to "TRUE".
- Define the setpoints for lrVelocity, lrAcceleration, lrDeceleration, and lrJerk.
- To start the operating mode, set xStart to "TRUE".
Interface in the IEC Editor
Note:
When xStart has a value of "TRUE", the system accelerates with lrAcceleration. Once the target speed is reached, you receive the feedback message xInVelocity = "TRUE" in the OUT structure. When xStart has a value of "FALSE", the system decelerates with lrDeceleration. When the system is at standstill, the feedback message xStopped = "TRUE".
Trace recording

[1] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xActivate |
[2] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xStart |
[3] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[4] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[5] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[6] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.Out.xInVelocity |
[7] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.Out.xStopped |
