Modulo-Achsen
Steuern Sie die Achse in der Struktur Camming.Config.Start folgendermaßen an:
Schnittstelle im IEC-Editor

Ablauf
- Während die Master-Achse sich bewegt, wird das Start-Signal xStart im Mode "Camming" der Slave-Achse gesetzt.
- Mit der Konfiguration eTransitionType = "MASTERBASED" und eStartMode = "WITH_CW_CCW_REFERENCE_POSITION" wechselt der Zustand eGearingState zunächst von "STOPPED" (0) nach "WAITING_FOR_STARTPOSITION" (1).
- Sobald die Master-Achse die Trigger-Position (Referenzposition - halber Einkuppelweg) überfährt (Position des Cursors), beginnt die masterbasierte Transition. Der Zustand eGearingState wechselt von "WAITING_FOR_STARTPOSITION" (1) nach "GEAR_IN" (2).
- Nach Durchfahren des konfigurierten Einkuppelwegs lrGearInDistance wechselt der Zustand eGearingState von "GEAR_IN" (2) nach "ACTIVE" (3).
Trace-Aufzeichnung
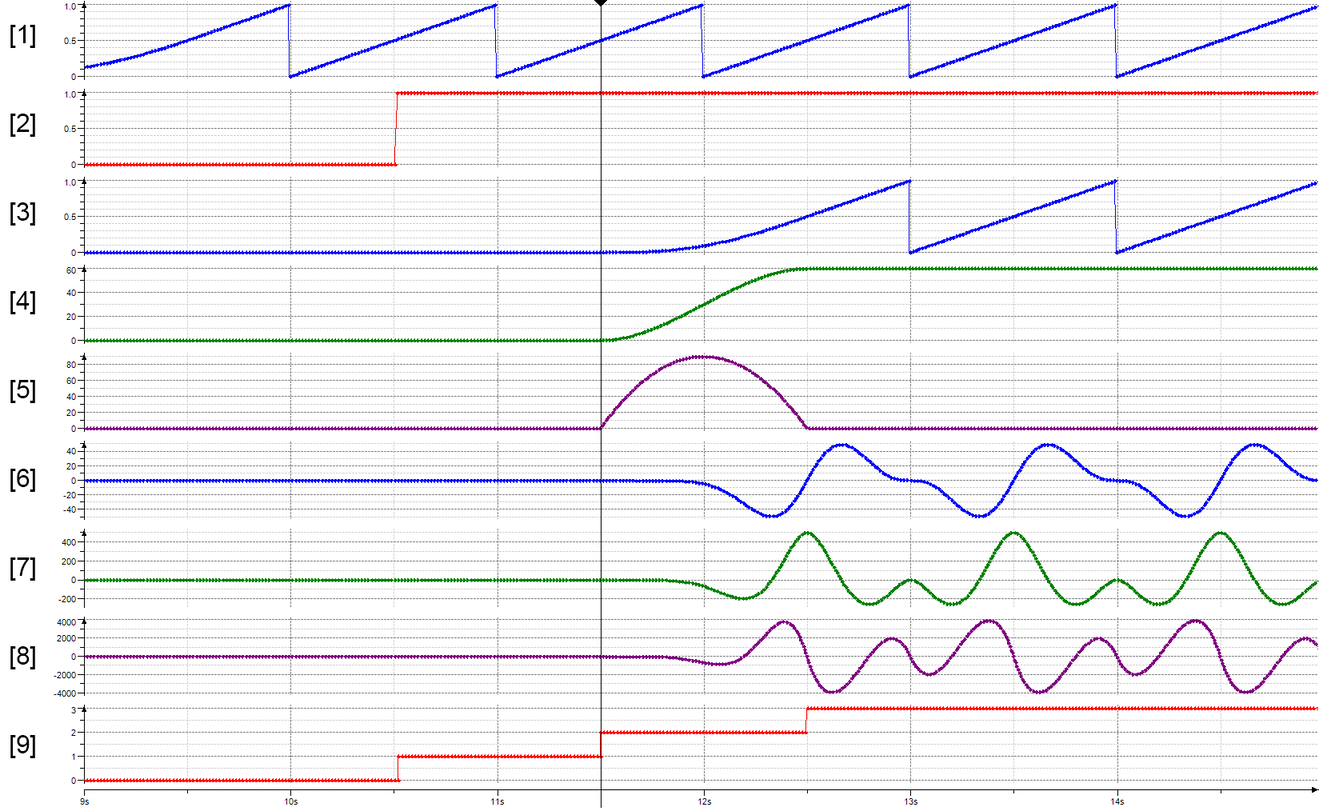
[1] | Position der Master-Achse |
[2] | Start-Signal xStart des Mode Camming |
[3] | Position des internen Masters |
[4] | Geschwindigkeit des internen Masters |
[5] | Beschleunigung der internen Masters |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
[9] | Zustand eGearingState des Mode Camming |
