Einkuppel-Mechanismus mit Referenzposition
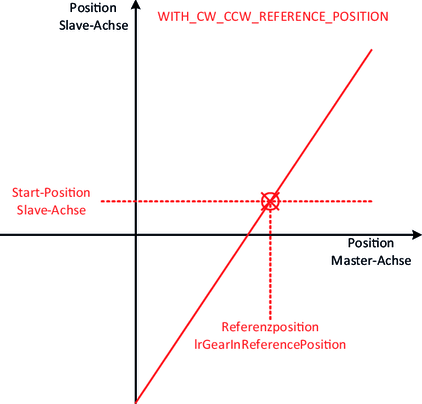
Beim Einkuppel-Mechanismus mit Referenzposition ergibt sich der "Aufhängepunkt" der Geraden aus der aktuellen Position der Slave-Achse und der konfigurierten Referenzposition lrGearInReferencePosition der Master-Achse.
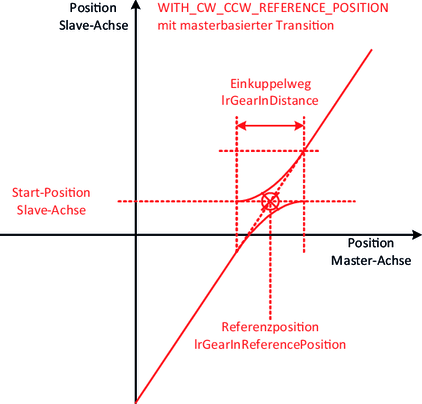
Eine wichtige Eigenschaft dieses Einkuppel-Mechanismus ist, dass die Verwendung einer Transition diesen "Aufhängepunkt" nicht verändert. Ein masterbasierte Transition führt mit dem konfigurierten Einkuppelweg lrGearInDistance auf genau diese Gerade.
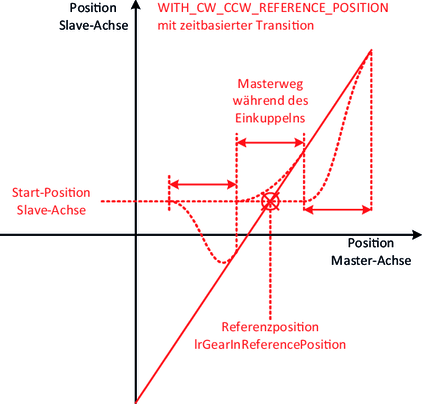
Eine zeitbasierte Transition führt ebenfalls auf diese Gerade, allerdings hängt die resultierende Transition von den Randbedingungen ab. Je nach Zustand der Master-Achse (Position, Geschwindigkeit, Beschleunigung) und je nach konfigurierter Einkuppel-Zeit lrGearInTime kann die Slave-Achse beim Einkuppeln reversieren oder auch übersynchron verfahren. In nachfolgendem Bild sind drei verschiedene Szenarien bei Bewegung der Master-Achse mit konstanter Geschwindigkeit zu sehen.
Beim Einkuppelmechanismus mit Referenz-Position soll das Aufsynchronisieren der Slave-Achse mit Bezug zur definierten Referenz-Position der Master-Achse erfolgen. Daher ist in den meisten Fällen die Einkuppel-Bedingung bei steigender Flanke am Start-Signal xStart nicht sofort erfüllt. Beim Einkuppeln wechselt daher der Zustand eGearingState von "STOPPED" (0) nach "WAITING_FOR_STARTPOSITION" (1).
Beim Einkuppeln gilt insbesondere:
- Wenn keine Transition konfiguriert ist, erfolgt das Aufsynchronisieren, wenn die Master-Achse die konfigurierte Referenzposition lrGearInReferencePosition in der konfigurierten Richtung überfährt. Der Zustand eGearingState wechselt in diesem Moment von "WAITING_FOR_STARTPOSITION" (1) nach "ACTIVE" (3).
- Wenn eine masterbasierte Transition konfiguriert ist, wird eine Trigger-Position berechnet, die einen halben Einkuppelweg lrGearInDistance vor der konfigurierten Referenzposition lrGearInReferencePosition liegt. Das Aufsynchronisieren beginnt dann, wenn die Master-Achse die berechnete Trigger-Position in der konfigurierten Richtung überfährt. Der Zustand eGearingState wechselt in diesem Moment von "WAITING_FOR_STARTPOSITION" (1) nach "GEAR_IN" (2).
- Wenn eine zeitbasierte Transition konfiguriert ist, beginnt das Aufsynchronisieren sofort, wenn die Master-Achse sich in die konfigurierte Richtung bewegt. Der Zustand eGearingState wechselt dann sofort von "STOPPED" (0) nach "GEAR_IN" (2).
