Direkter Einkuppel-Mechanismus
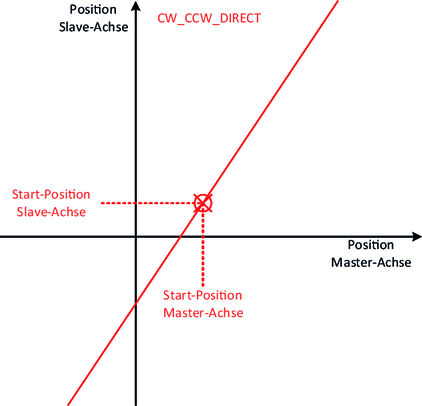
Beim direkten Einkuppel-Mechanismus ergibt sich der "Aufhängepunkt" der Geraden, aus den Start-Positionen der Master- und Slave-Achse, also den Positionen, an welchen diese Achsen beim Schalten des Start-Signals xStart stehen. Nachfolgendes Bild zeigt den Bezug zwischen Slave- und Master-Position für eStartMode = "CW_CCW_DIRECT" ohne Transition. Ausgehend von den aktuellen Positionen wird die Position der Slave-Achse mit den Faktoren lrGearNumerator und lrGearDenominator linear weiterentwickelt.
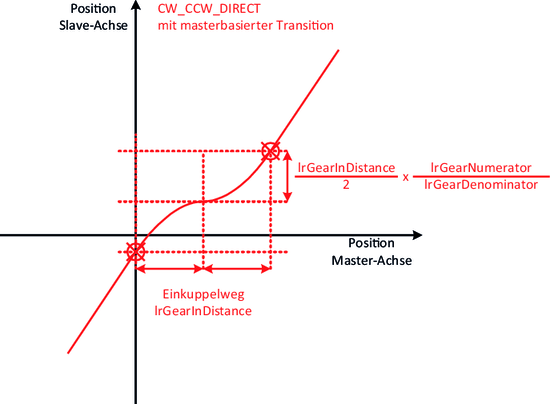
Beim Verwenden einer masterbasierten Transition beim Einkuppeln, verschieben sich die "Aufhängepunkte" der Geraden in Abhängigkeit vom konfigurierten Einkuppelweg lrGearInDistance. Nachfolgendes Bild zeigt den Bezug zwischen Slave- und Master-Position mit einer masterbasierten Transition für eStartMode = "CW_CCW_DIRECT":
Beim direkten Einkuppel-Mechanismus ist die Einkuppel-Bedingung erfüllt, wenn zum Zeitpunkt der steigenden Flanke des Start-Signals xStart die Bewegung des Masters mit der konfigurierten Bewegungsrichtung übereinstimmt.
Beim Einkuppeln gilt insbesondere:
- CW_DIRECT
- Die Einkuppel-Bedingung ist erfüllt, wenn bei steigender Flanke an xStart der Master sich in positive Richtung bewegt.
- CCW_DIRECT
- Die Einkuppel-Bedingung ist erfüllt, wenn bei steigender Flanke an xStart der Master sich in negative Richtung bewegt.
- CW_CCW_DIRECT
- Die Einkuppel-Bedingung ist bei steigender Flanke an xStart immer erfüllt, auch wenn der Master steht.
Wenn die Einkuppel-Bedingung erfüllt und eine Transition gefordert ist, wechselt der Zustand an eGearingState nach "GEAR_IN". Wenn keine Transition gefordert ist, wechselt der Zustand direkt nach "ACTIVE". Wenn die Einkuppel-Bedingung nicht erfüllt ist, wechselt der Zustand von "STOPPED" nach "WAITING_FOR_STARTPOSITION".
