Tracking mit konfigurierter Achse als Master-Quelle
Das nachfolgende Anwendungsbeispiel zeigt Ihnen, wie Sie die Betriebsart "Tracking" mit einer konfigurierten Achse als Master-Quelle konfigurieren. Im Beispiel folgt Achse 2 der Achse 1. Achse 1 verfährt dabei in der Betriebsart "Velocity" mit 60 Takten/min. Als Proportionalfaktor sind 100 mm/Takt eingestellt.
Ansteuerung
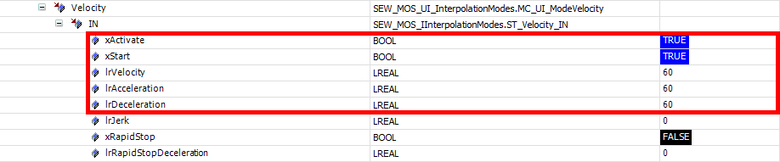
Steuern Sie die Achse in der Struktur Velocity folgendermaßen an:
- Setzen Sie xActivate auf "TRUE", um die Betriebsart zu aktivieren.
- Definieren Sie eine Geschwindigkeit von 60 Takten/min, in dem Sie lrVelocity, lrAcceleration undlrDeceleration auf 60 setzen.
- Setzen Sie xStart auf "TRUE", um die Betriebsart zu starten.
Steuern Sie die Achse in der Struktur Tracking folgendermaßen an:
- Setzen Sie xActivate auf "TRUE", um die Betriebsart zu aktivieren.
- Definieren Sie einen Proportionalfaktor von 100 mm/Takt, in dem Sie diTrackingNumerator auf 100 und diTrackingDenominator auf 1 setzen.
- Setzen Sie xStart auf "TRUE", um die Betriebsart zu starten.
Schnittstelle im IEC-Editor

Trace-Aufzeichnung

[1] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xActivate |
[2] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xStart |
[3] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[4] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[5] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[6] | SEW_GVL.Interface_Axis2.ProfileGeneration.Tracking.In.xActivate |
[7] | SEW_GVL.Interface_Axis2.ProfileGeneration.Tracking.In.xStart |
[8] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[9] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[10] | SEW_GVL_Internal.Axis2._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
Anmerkung:
- Die Messung mit Cursor1 und Cursor2 zeigt, dass die Slave-Achse genau 100 mm fährt, während die Master-Achse 1-Takt zurücklegt
- Die Master-Achse bewegt sich mit 60 Takten/min. Die Slave-Achse verfährt folglich mit 100 mm/s
- Die Master-Achse beschleunigt mit 60 Takten/min/s. Sie erreicht die Geschwindigkeit nach 1 Sekunde; dementsprechend beschleunigt die Slave-Achse mit 100 mm/s/s
