Funktionsbeschreibung
Weiterführende Informationen
- Roboterzustände
- Tippbetrieb
- Programmbetrieb
- Bewegungsparametersätze
- Rückpositionierung (BackToPath)
- Referenzierbetrieb
- Zugriffsverwaltung
- Simulation
- Software-Endschalter
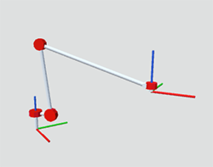
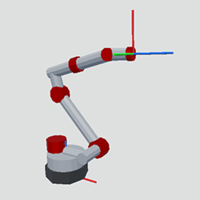
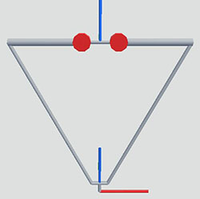
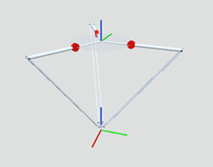
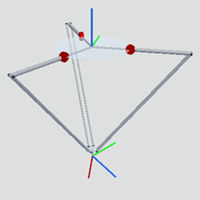
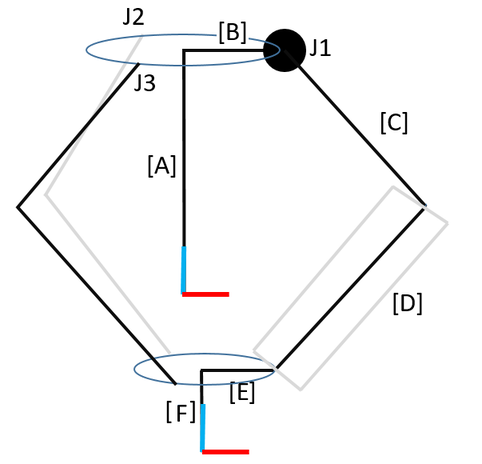
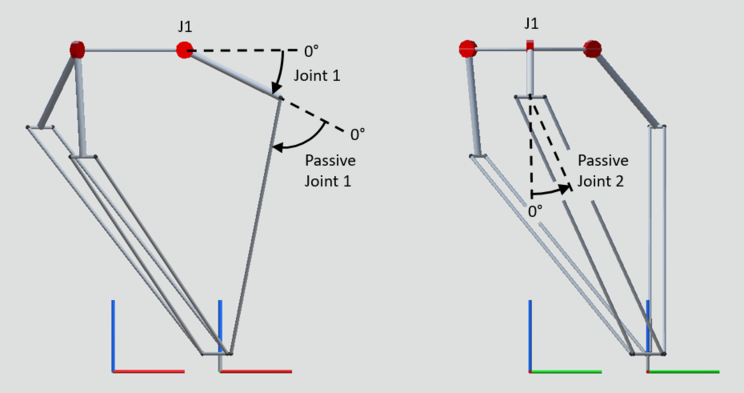
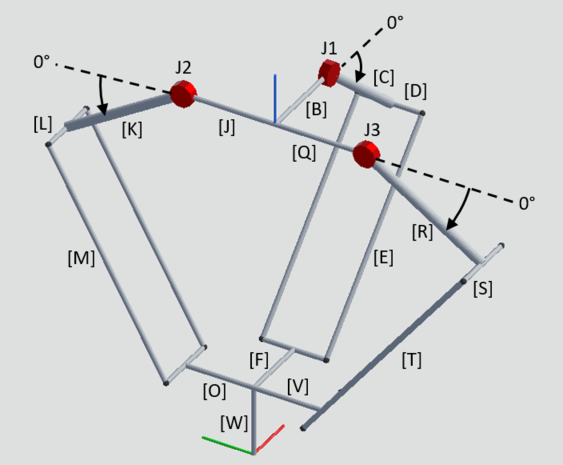
- Kinematikmodelle
- Bahnereignisse
- Touchprobe
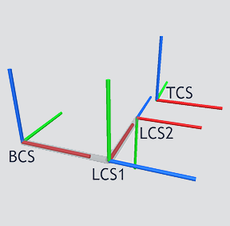
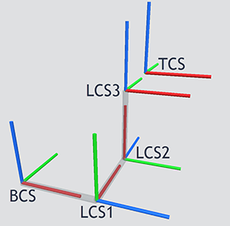
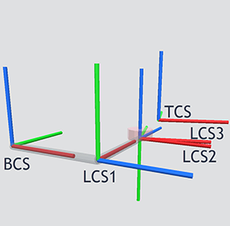
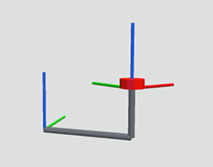
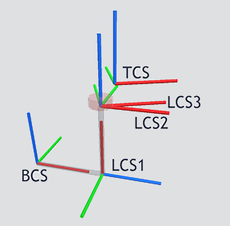
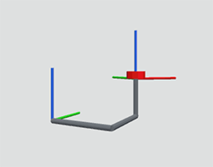
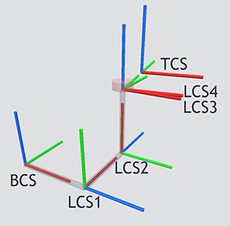
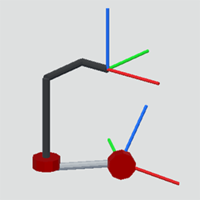
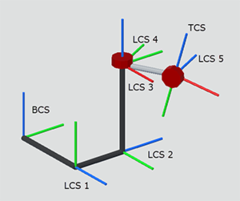
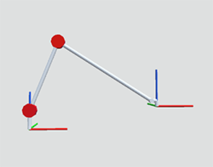
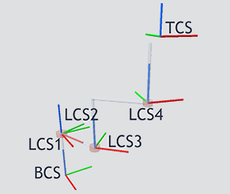
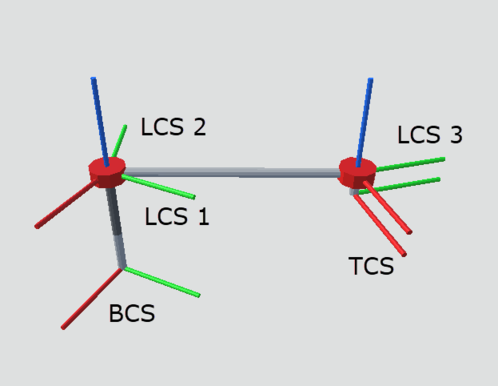
- Statische Koordinatensysteme
- Synchronisierung mit bewegten Objekten
- Physiksimulation
- Kombination von Kurvenscheiben- und Robotikfunktionalität
- Automatischer G-Code-Import