Konfiguration
- Für das folgende Anwendungsbeispiel wird als Hardware ein MOVI-C® CONTROLLER benötigt. Die verwendeten realen Achsen werden simuliert.
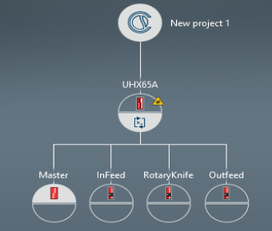
- Legen Sie in MOVISUITE® im Modus "Planung" ein Projekt mit einem MOVI-C® CONTROLLER, einer virtuellen ("Master") und drei realen Achsen ("InFeed", "RotaryKnife", "OutFeed") an. Die virtuelle Achse fungiert im Anwendungsbeispiel als Master-Achse.
- Konfigurieren Sie für die realen Achsen einen gültigen Antriebsstrang ohne Anwendereinheiten.
- Weisen Sie den Achsen folgende Softwaremodule zu:
- Master: MOVIKIT® Gearing
- InFeed: MOVIKIT® FilmFeeder
- RotaryKnife: MOVIKIT® RotaryKnife
- OutFeed: MOVIKIT® Gearing
- Konfigurieren Sie für die "Master"-Achse die Anwendereinheit:
- Anwendereinheit: Benutzerdefinierte Einheit: Takt
- Position: Takt, Anzahl Nachkommastellen: 6
- Geschwindigkeit: Takt/min, Anzahl Nachkommastellen: 4
- Beschleunigung: Takt/(min*s), Anzahl Nachkommastellen: 2
- Konfigurieren Sie für die "Master"-Achse die Zyklusbegrenzung.
- Modulo-Minimum: 0 Takte
- Modulo-Maximum: 1 Takt
- Konfigurieren Sie für die "InFeed"-Achse die Anwendereinheit:
- Anwendereinheit: Benutzerdefinierte Einheit: mm
- 1 Umdrehung = 100 mm
- Position: mm, Anzahl Nachkommastellen: 3
- Geschwindigkeit: mm/s, Anzahl Nachkommastellen: 4
- Beschleunigung: mm/(s*s), Anzahl Nachkommastellen: 2
- Konfigurieren Sie für die "RotaryKnife"-Achse die Anwendereinheit:
- Anwendereinheit: Grad
- Position: Grad, Anzahl Nachkommastellen: 3
- Geschwindigkeit: Grad/s, Anzahl Nachkommastellen: 4
- Beschleunigung: Grad/(s*s), Anzahl Nachkommastellen: 2
- Überprüfen Sie bei der "RotaryKnife"-Achse die Konfiguration folgender Zyklusbegrenzung.
- Modulo-Minimum: 0 Grad
- Modulo-Maximum: 360 Grad
- Konfigurieren Sie für die "OutFeed "-Achse die Anwendereinheit:
- Anwendereinheit: Benutzerdefinierte Einheit: mm
- 1 Umdrehung = 100 mm
- Position: mm, Anzahl Nachkommastellen: 3
- Geschwindigkeit: mm/s, Anzahl Nachkommastellen: 4
- Beschleunigung: mm/(s*s), Anzahl Nachkommastellen: 2
- Konfigurieren Sie das Softwaremodul der "Master"-Achse:
- Feldbus-Schnittstelle - Feldbusanbindung aktivieren
- Feldbus-Schnittstelle - Startadresse: 1
- Konfigurieren Sie das Softwaremodul der "InFeed"-Achse:
- Grundeinstellungen - Simulation aktivieren
- Synchronlauf - Master-Quelle: konfigurierte Achse
- Synchronlauf - Name der Masterachse: Master
- Feldbus-Schnittstelle - Feldbusanbindung aktivieren
- Feldbus-Schnittstelle - Startadresse: 9
- Konfigurieren Sie das Softwaremodul der "RotaryKnife"-Achse:
- Grundeinstellungen - Simulation aktivieren
- Kurvenscheibe - Masterquelle: Konfigurierte Achse
- Kurvenscheibe - Name der Masterachse: Master
- Rotierendes Messer - Typ der Masterachse : Modulo-Achse - Zyklische Position
- Feldbus-Schnittstelle - Feldbusanbindung aktivieren
- Feldbus-Schnittstelle - Startadresse: 25
- Konfigurieren Sie das Softwaremodul der "OutFeed"-Achse:
- Grundeinstellungen - Simulation aktivieren
- Synchronlauf - Master-Quelle: konfigurierte Achse
- Synchronlauf - Übersetzungsverhältnis Master/Slave Zähler: 160 mm
- Synchronlauf - Übersetzungsverhältnis Master/Slave Nenner: 1 Takt
- Synchronlauf - Name der Masterachse: Master
- Feldbus-Schnittstelle - Feldbusanbindung aktivieren
- Feldbus-Schnittstelle - Startadresse: 41
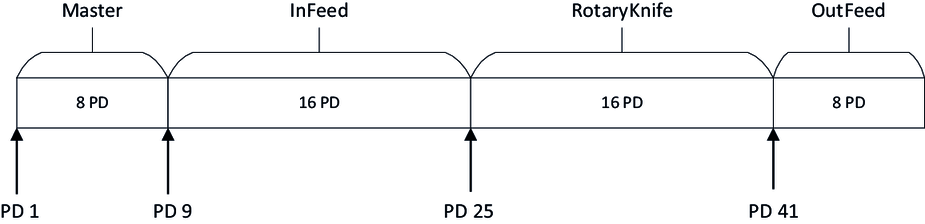
- Aus der Konfiguration resultiert folgende Prozessdatenbelegung:
- Wechseln Sie in den Modus "Inbetriebnahme".
- Verbinden Sie den MOVI-C® CONTROLLER in der Projekt-Sicht mit dem MOVI-C® CONTROLLER in der Netzwerkansicht und aktualisieren Sie anschließend das IEC-Projekt.
