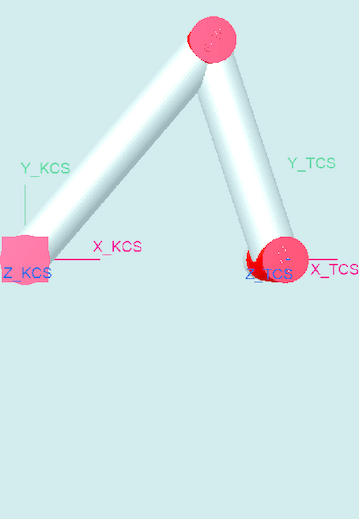
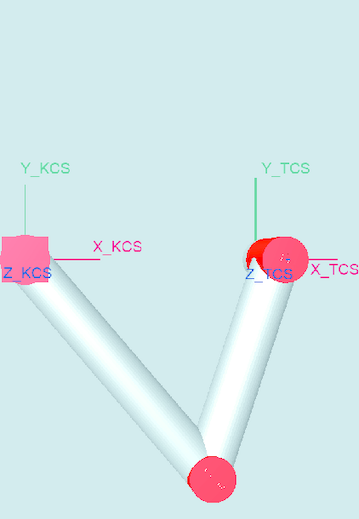
Kinematic models
MOVIKIT® Robotics
Language
Deutsch
English
SEW-EURODRIVE
Home
Basics
Kinematic models