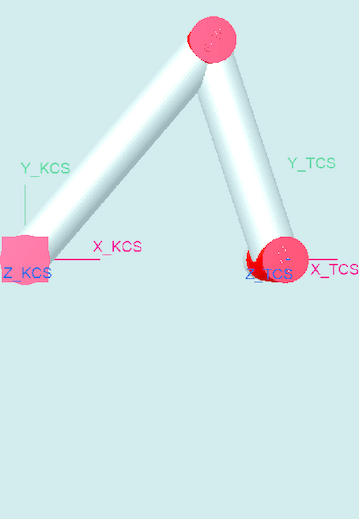
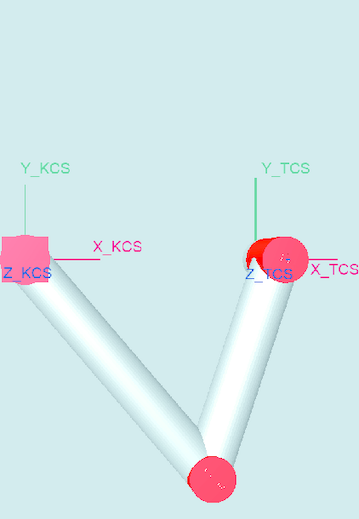
Kinematikmodelle
MOVIKIT® Robotics
Sprache
Deutsch
English
SEW-EURODRIVE
Home
Grundlagen
Kinematikmodelle