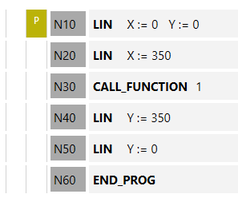
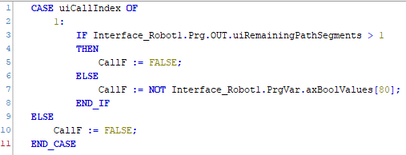
G-Code
MOVIKIT® Robotics
Sprache
Deutsch
English
SEW-EURODRIVE
Home
Funktionsbeschreibung
G-Code