Kombination von Kurvenscheiben- und Robotikfunktionalität
Folgendes Anwendungsbeispiel zeigt, wie die Kurvenscheiben-und Roboterfunktionalitäten kombiniert werden können. Weitere Informationen finden Sie im Kapitel Funktionsbeschreibung.
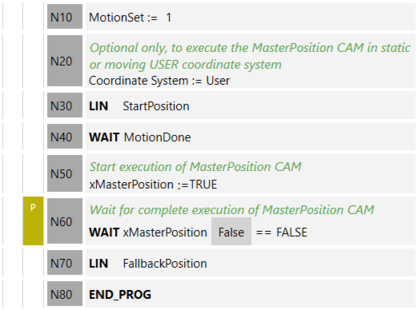
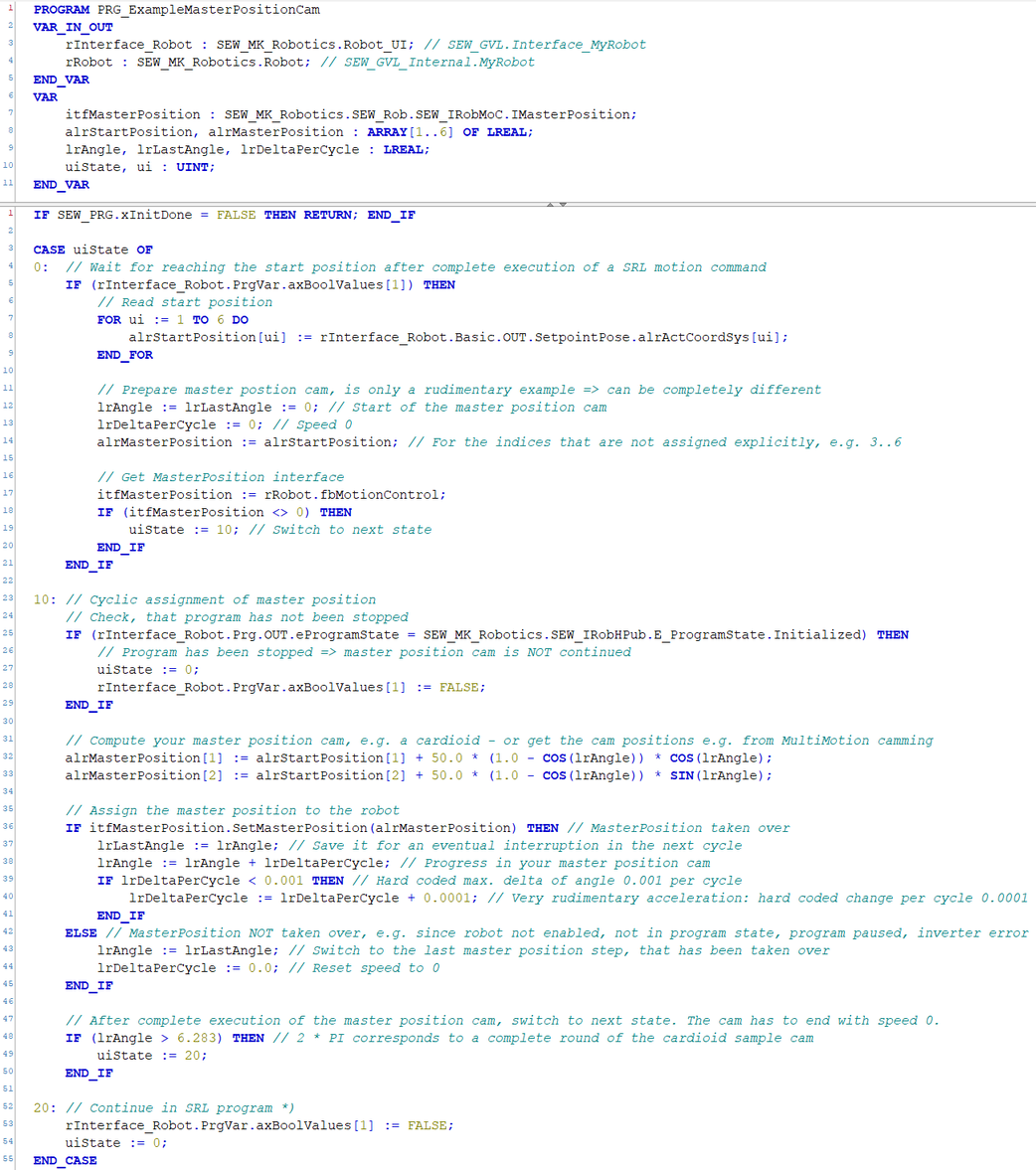
Zum Verwenden von Kurvenscheiben für die Roboterbahnen müssen Sie im Programmbetrieb zunächst einen SRL-Bewegungsbefehl zum Startpunkt der Kurvenscheibe ausführen. Anschließend weisen Sie die kartesischen Koordinaten der Kurvenscheibe als Masterposition zyklisch in der Task HighPriority mittels der Methode SetMasterPosition() zu (s. folgendes Beispiel). Die Kurvenscheibe muss im Stillstand beginnen und stetig sein. Sobald die Kurvenscheibe im Stillstand beendet ist, kann im SRL-Programm z. B. der nächste SRL-Bewegungsbefehl eingespeist werden.
Die Methode SetMasterPosition() gibt TRUE zurück, wenn die Übernahme der Masterposition erfolgreich war. Sie gibt FALSE zurück, wenn z. B. die Bewegung wegen eines Fehlers, der Wegnahme der Freigabe oder Pausieren des Programms unterbrochen wurde. Beim erneuten Starten positioniert der Roboter automatisch zur letzten erfolgreich übernommenen Masterposition zurück (BackToPath). Die Kurvenscheibe muss dann applikativ ab dieser Stelle aus Stillstand heraus wieder angefahren werden.
Um bei einer Unterbrechung z. B. wegen Öffnens einer Schutztür eine Bahnabweichung von der eingespeisten Kurvenscheibe zu vermeiden, sollte diese zunächst auf Stillstand abgebremst werden, bevor am Roboter die Freigabe weggenommen wird.
Die Kurvenscheibe kann nicht nur in statischer Umgebung im Koordinatensystem BASE oder USER ausgeführt werden, sondern auch in einem bewegten USER-Koordinatensystem. Hierzu muss lediglich bereits der vorhergehende SRL-Bewegungsbefehl im USER-Koordinatensystem angefahren werden. Siehe Synchronisierte Bewegung mit einem Transportband (Conveyor Tracking). So können z. B. auf einem Transportband oder Drehtisch bewegte Waren mit der gewünschten Kontur bearbeitet werden.
Das folgende Beispiel kann im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py]. Anschließend muss das Programm z. B. wie folgt in der USER_PRG.HighPrio() aufgerufen und dabei der vom Anwender in MOVISUITE® vergebene Name des Roboterknotens (z. B. MyRobot) dem Beispielprogramm übergeben werden:
PRG_ExampleMasterPositionCam(rInterface_Robot :=
Interface_MyRobot, rRobot := MyRobot);
Beispiel-SRL-Programm zur Kombination von Kurvenscheiben- und Robotikfunktionalität. xMasterPosition ist passend zum oben gezeigten Beispiel-IEC-Code die SRL-Variable BOOLVAR[1].