Ansteuerung über das IEC-Programm
HINWEIS
Folgende Beispiele können im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py].
Die folgenden Anwendungsbeispiele zeigen, wie das Softwaremodul über das IEC-Anwenderprogramm angesteuert werden kann. Das jeweilige Programm muss wie folgt in der USER_PRG.Main() aufgerufen und dabei die Roboter-Instanz dem Beispielprogramm übergeben werden:
PRG_ExampleControlRobot_Recommended_Extended(
rInterface_Robot := Interface_Robot);
4 Beispielprogramme werden zur Verfügung gestellt:
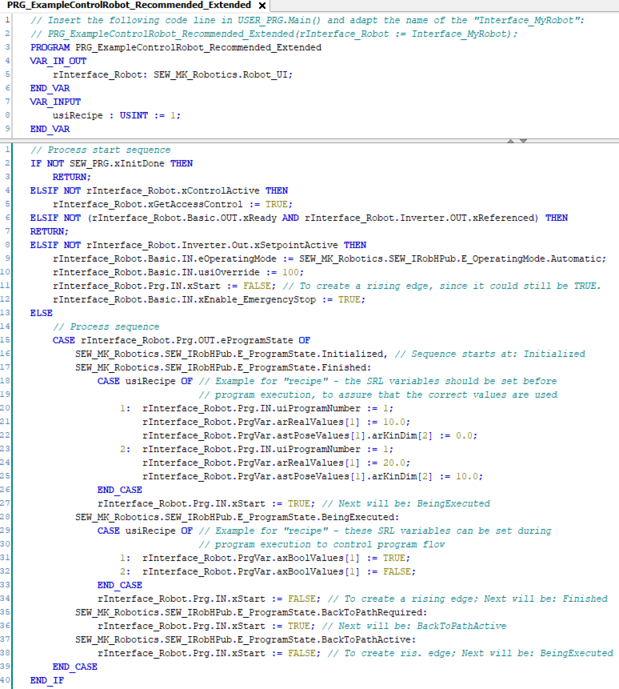
- Ansteuerung mit BackToPath (empfohlen)
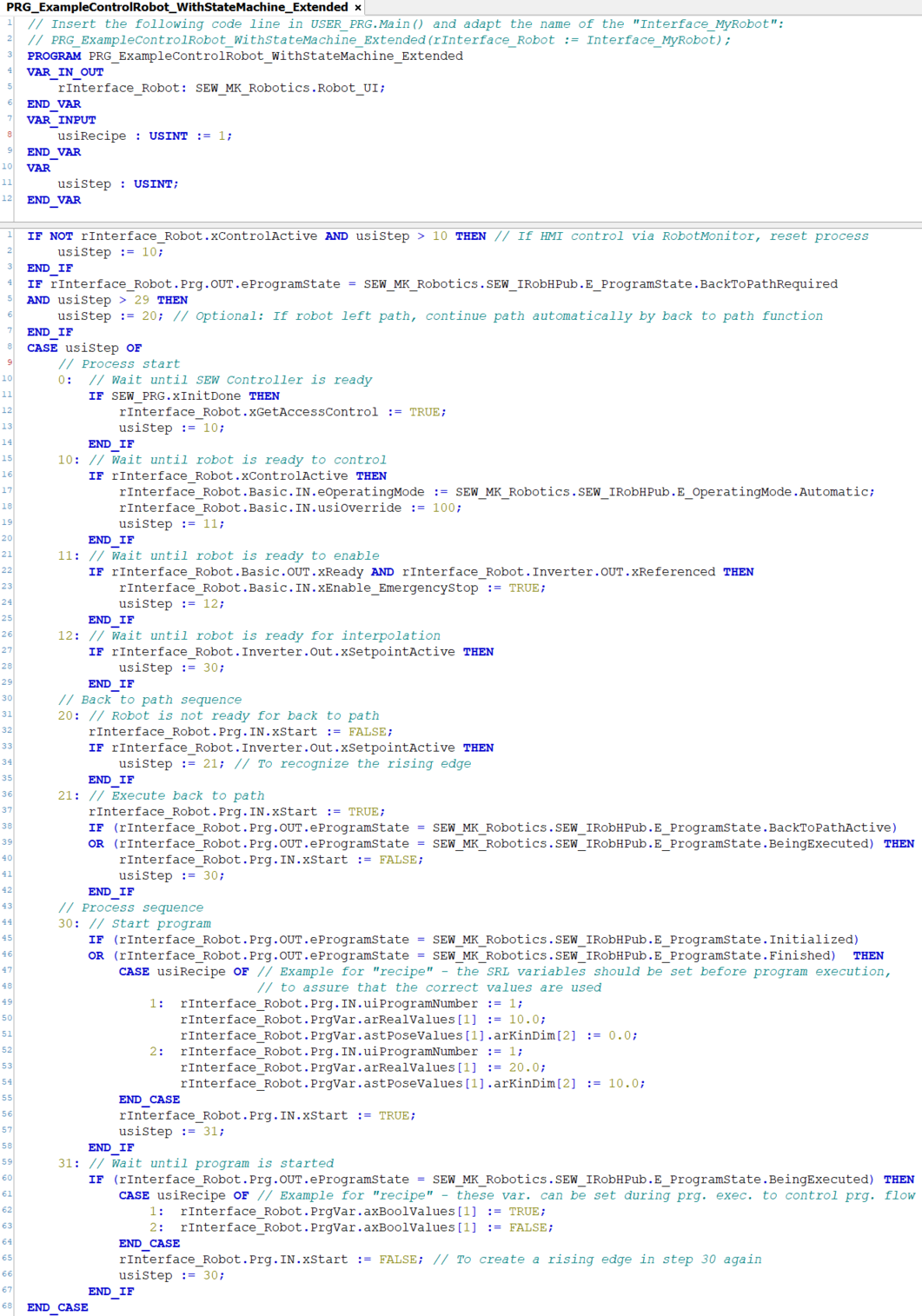
- Ansteuerung mit BackToPath und State-Machine
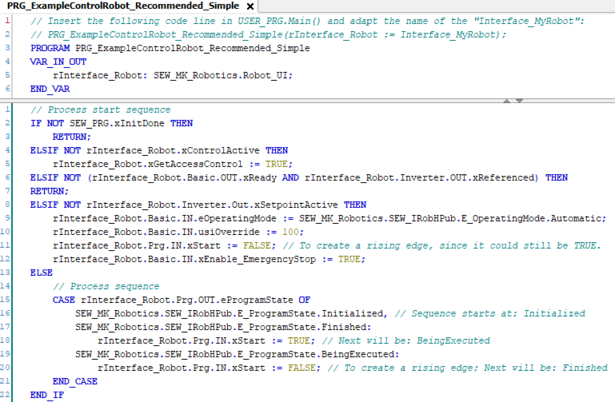
- Ansteuerung ohne BackToPath
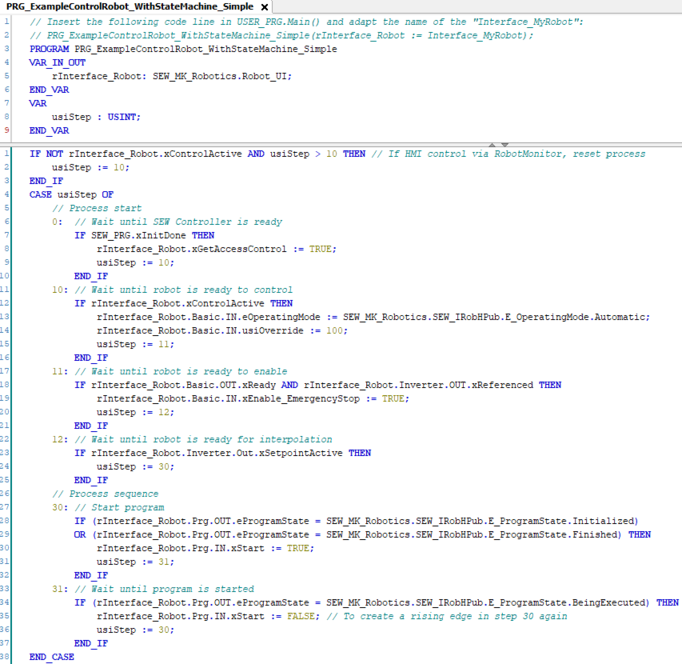
- Ansteuerung ohne BackToPath mittels State-Machine
Es wird die Ansteuerung ohne State-Machine empfohlen, damit ein eventuelles Hängenbleiben in einem Schritt grundsätzlich ausgeschlossen ist.
Detaillierte Informationen zu den Signalen und der Ablaufsequenz finden Sie im Kapitel Ansteuerung durch die Prozess-Steuerung.