Verarbeitung von Ruck-Vorgaben
Beim Verarbeiten bestimmter Ruck-Vorgaben kann es zu unerwartetem Verhalten der Anlage kommen. Die nachfolgend beschriebenen Beispiele veranschaulichen mögliche Szenarien:
ACHTUNG

Unerwartetes Anlagenverhalten durch Reversierung des Antriebs
Tod, schwere Verletzungen, Sachschaden
- Verändern Sie den vorgegebenen Ruck nicht, sondern behandeln Sie ihn wie eine einmalig konfigurierte Größe.
- Verändern Sie den vorgegebenen Ruck nur, wenn die aktuell wirksame Beschleunigung den Wert "0" hat.
Beispiel 1
Der Anwender möchte in einer bestimmten Situation schnell stoppen. Dazu gibt er an der Eingangsvariable lrJerk einen großen Ruck vor und nimmt das Start-Signal xStart weg. In der Folge baut sich mit dem großen vorgegebenen Ruck die Verzögerung auf, mit der die Geschwindigkeit reduziert wird.
Noch bevor die Geschwindigkeit den Wert "0" erreicht hat, entscheidet der Anwender, die Bewegung doch fortzusetzen. Dazu gibt er an der Eingangsvariable lrJerk einen kleineren Ruck vor und schaltet das Start-Signal xStart wieder zu. In der Folge baut sich die Verzögerung mit dem nun kleinen Ruck ab, sodass selbst nach dem Zuschalten des Start-Signals noch über eine gewisse Zeit eine negative Beschleunigung wirkt. Diese führt dazu, dass die Geschwindigkeit negativ werden kann, d. h. der Antrieb reversiert.
Nachfolgendes Diagramm veranschaulicht dieses Szenario.

v(t) | Geschwindigkeit |
a(t) | Beschleunigung |
j(t) | Ruck |
Beispiel 2
Der Anwender hat eine Bewegung mit einer bestimmten Geschwindigkeit in eine bestimmte Richtung angestoßen. Nun möchte er in einer bestimmten Situation die Geschwindigkeit schnell reduzieren. Dazu gibt er an der Eingangsvariable lrVelocity eine neue kleinere Geschwindigkeit und über lrJerk einen großen Ruck vor. In der Folge baut sich mit dem großen vorgegebenen Ruck die Verzögerung auf, mit der die Geschwindigkeit reduziert wird.
Noch bevor die Geschwindigkeit den vorgegebenen Wert erreicht hat, entscheidet der Anwender, die Geschwindigkeit wieder zu erhöhen. Dazu gibt er an der Eingangsvariable lrVelocity eine größere Geschwindigkeit, an lrJerk aber einen kleineren Ruck vor. In der Folge baut sich die Verzögerung mit dem nun kleinen Ruck ab, sodass noch über eine gewisse Zeit eine negative Beschleunigung wirkt. Diese führt dazu, dass die Geschwindigkeit negativ werden kann, d.h. der Antrieb reversiert.
Nachfolgendes Diagramm veranschaulicht dieses Szenario.

v(t) | Geschwindigkeit |
a(t) | Beschleunigung |
j(t) | Ruck |
Erläuterung
Ein derartiges Szenario kann sich immer ergeben, wenn eine mit einem großen Ruck erreichte Verzögerung, mit einem kleinen Ruck in eine Beschleunigung verändert werden soll. Dabei wird die Profilgeneration in einen Zustand gebracht, der sich durch folgende Merkmale kennzeichnet:
- Die Bewegung erfolgt in eine bestimmte Richtung mit einer bestimmten Geschwindigkeit.
- Der Geschwindigkeit wirkt eine Verzögerung entgegen.
- Die Verzögerung soll unter Berücksichtigung des vorgegebenen Rucks in eine Beschleunigung überführt werden.
- Die der Geschwindigkeit entgegenwirkende Verzögerung wird mit dem vorgegebenen Ruck abgebaut.
- Solange diese Verzögerung nicht den Wert "0" erreicht hat, wirkt sie der Geschwindigkeit weiter entgegen, was letztendlich zu einem Vorzeichenwechsel bei der Geschwindigkeit führen kann und somit zu einem möglicherweise unerwarteten Reversieren des Antriebs.
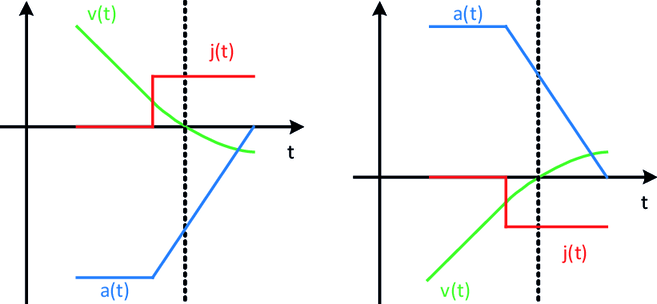
Nachfolgende Diagramme veranschaulichen diese Szenarien. Dabei können folgende 2 Fälle unterschieden werden:
- Die Geschwindigkeit ist positiv und die Beschleunigung negativ (linkes Diagramm)Die Geschwindigkeit ist negativ und die Beschleunigung positiv (rechtes Diagramm)
In beiden Fällen reversiert die Bewegung im durch die senkrechte Gerade gekennzeichneten Zeitpunkt.
HINWEIS
Der Anwender trägt die Verantwortung dafür, dass die konfigurierte Ansteuerung der Profilgeneration nicht zu einem unerwarteten Verhalten führt.
Typischerweise kann ein unerwartetes Reversieren durch folgende Maßnahmen vermieden werden:
- Der vorgegebene Ruck wird nicht verändert, sondern wie eine einmalig konfigurierte Größe behandelt.
- Der vorgegebene Ruck wird nur verändert, wenn die aktuell wirksame Beschleunigung den Wert "0" hat.
