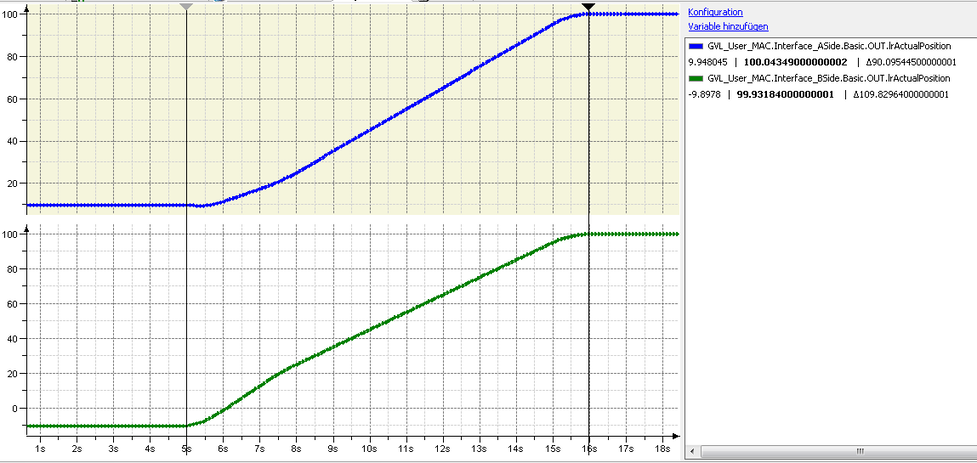
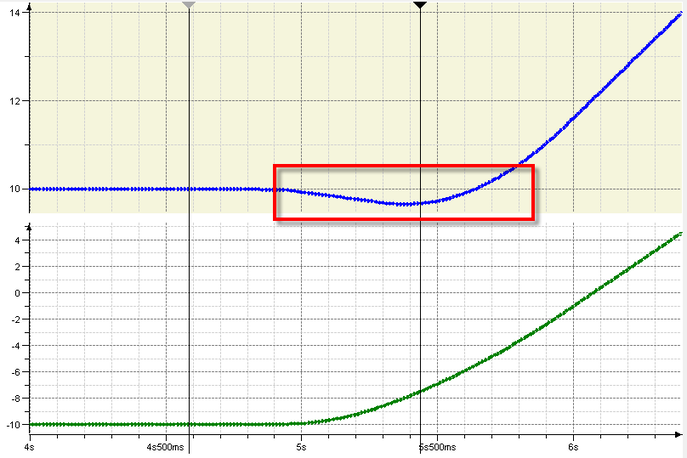
Group members synchronize while moving
- Set the lrMACPriority_Torque_Skew variable of the SuperAxisGroup to the value "2" to activate the operating mode "Skew priority – without overload protection", and reference all group members.
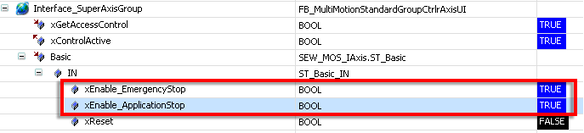
- In the Basic.IN structure of the SuperAxisGroup, set the xEnable_EmergencyStop and xEnable_ApplicationStop variables to "TRUE".
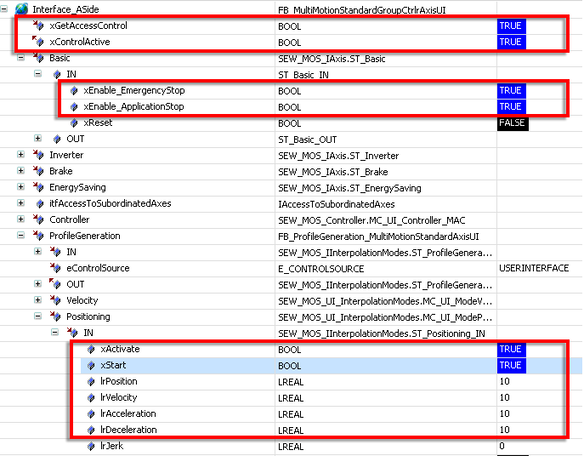
- Set the xGetAccessControl variable of the ASide to "TRUE" to request access to the user interface of the axis group.
- In the Basic.IN structure of the ASide, set the xEnable_EmergencyStop and xEnable_ApplicationStop variables to "TRUE" to enable the axis group.
- In the ProfileGeneration.Positioning.IN structure of the ASide, enter 10 as the lrPosition target position.
- Set the xGetAccessControl variable of the ASide to "FALSE" to terminate access to the axis group.
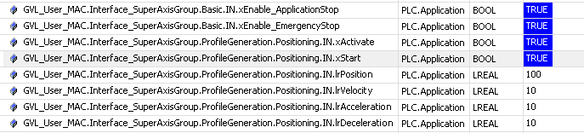
- In the Basic.IN structure of the SuperAxisGroup, set the xEnable_EmergencyStop and xEnable_ApplicationStop variables to "TRUE" to enable the axis group.
- At the same time, set the following signals in the "Positioning" structure.
- In the ProfileGeneration.Positioning.IN structure of the SuperAxisGroup, enter the value "100" as the lrPosition target position.
- In the ProfileGeneration.Positioning.IN structure of the SuperAxisGroup, enter the value "10" for lrVelocity, lrAcceleration, and lrDeceleration for the movement of the axis group.
- In the ProfileGeneration.Positioning.IN structure of the SuperAxisGroup, set the xActivate and xStart variables to "TRUE" to carry out a movement.