Totzeit-Kompensation des Aktors
Die Totzeit des Aktors in Bezug zur Position kann geschwindigkeits- und beschleuni-gungsseitig kompensiert werden.
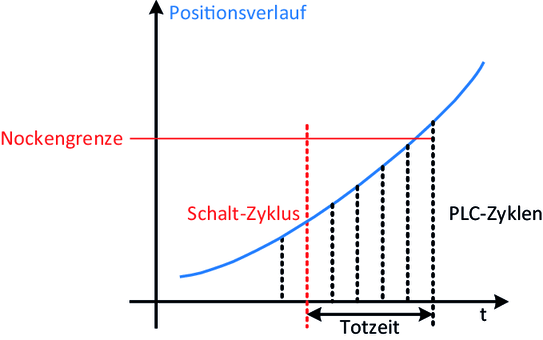
Der Zustand des Ausgangs wird basierend auf der Annahme bestimmt, dass sich die Beschleunigung innerhalb der Totzeit nicht ändert. Basierend auf der aktuellen Position, der aktuellen Geschwindigkeit und der aktuellen Beschleunigung wird also vorausberechnet, welche Position nach Ablauf der Totzeit erreicht ist.

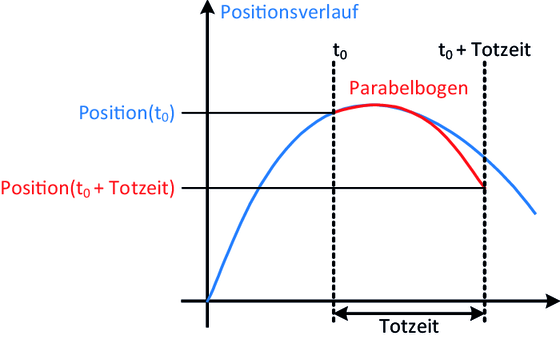
Anschaulich bedeutet dies: Der Positionsverlauf wird in jedem Punkt durch einen Parabelbogen mit gleicher Steigung (Geschwindigkeit) und gleicher Krümmung (Beschleunigung) extrapoliert. Basierend auf diesem Parabelbogen wird die Position nach Ablauf der Totzeit berechnet. Signifikante Abweichungen ergeben sich dann, wenn sich die Beschleunigung innerhalb der Totzeit stark ändert.
HINWEIS
Wenn z. B. die Sollwerte einer Achse als Quelle dienen und die Achse ohne Ruckbegrenzung verfahren wird, kann es sein, dass sich die Beschleunigung sprunghaft ändert. Dies kann in ungünstigen Fällen zum Prellen eines Nocken-Ausgangs führen. Gehen Sie dann wie folgt vor:
- Schalten Sie die Beschleunigungskompensation aus.
- Konfigurieren Sie einen Ruck ≠ 0, sodass eine sprunghafte Beschleunigungsänderung ausgeschlossen ist.
- Konfigurieren Sie eine Hysterese.
|
Der Nocken schaltet in dem PLC-Zyklus, in dem die extrapolierte Position die Nocken-grenze überfahren hat.
|