Joints
For the configuration of the emergency stop ramps, refer to chapter Joints / additional joint axes – limit values.
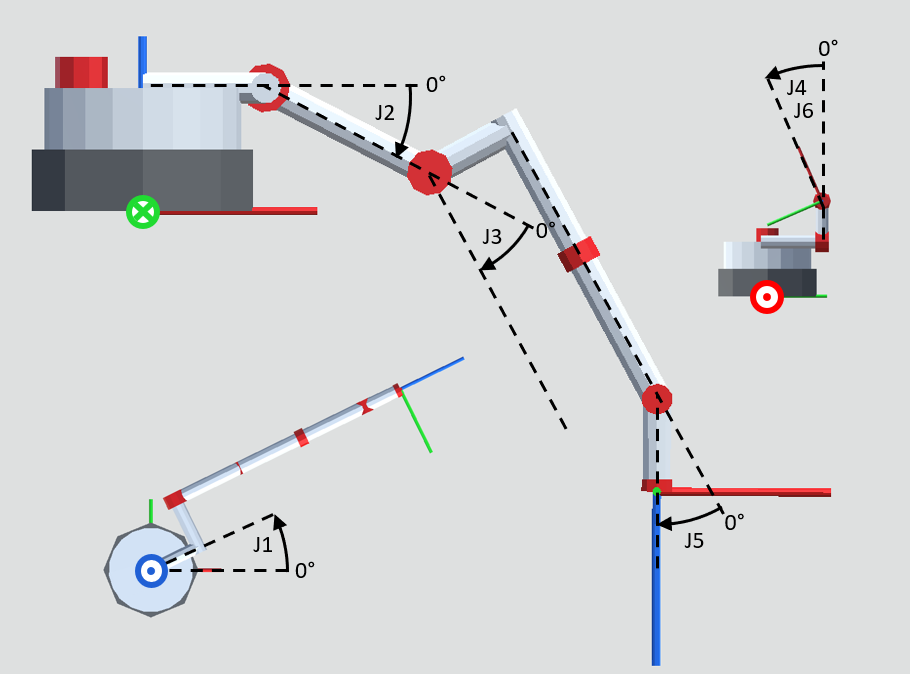
In addition to the 6 joint axes, you have to configure 1 kinematic limit. This limit acts as a software limit switch.
Parameter designation | Additional information |
|---|---|
Angle between the lines of joint 2 to joint 3 and of joint 3 to the wrist | Angle between the following connecting lines:
|
