Koordinatensysteme
Die Pose des Roboters lässt sich über verschiedene Koordinatensysteme angeben. Dabei sind abhängig von der Lage des Koordinatensystems die Koordinaten einer Pose in jedem Koordinatensystem unterschiedlich. Beim MOVIKIT® Robotics gibt es die folgenden Koordinatensysteme:
- Base
- Koordinatensystem, das im Allgemeinen körperfest im Sockel der Kinematik positioniert ist. Es dient als Bezugskoordinatensystem für die direkte kinematische Transformation (Transformation der Gelenkachswerte in kartesische Werte des Werkzeugs).
- Joint
- Koordinatensystem, in dem jede Koordinate einer Gelenkachse des Kinematikmodells entspricht.
- User
- Koordinatensystem, das sich in der aktuellen Version der Software auf Base bezieht. Es kann statisch oder bewegt sein.
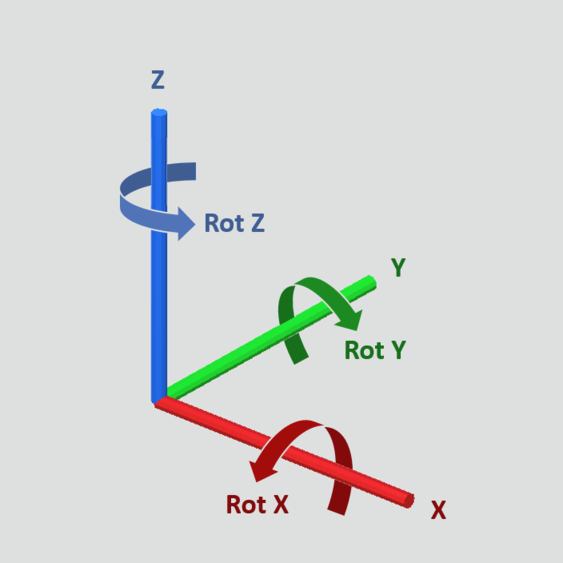
Es handelt sich um rechtshändige, kartesische Koordinatensysteme. Die X-Achse ist rot, die Y-Achse grün und die Z-Achse blau gefärbt. Drehungen um diese Achsen erfolgen in der Regel nach der rechten Hand Regel bzw. im mathematisch positiven Drehsinn.
Eine Drehung in 3D wird durch die Roll Pitch Yaw Winkel in der intrinsischen Z-X‘-Y‘‘-Konvention beschrieben:
- Drehung um die Z-Achse
- Drehung um die neue (gedrehte) Y‘-Achse
- Drehung um die neue (2x gedrehte) X‘‘-Achse
|