Regleroptimierung mit kombinierter Geberauswertung im Softwaremodul
Wenn die Positionsregelung im MOVI-C® CONTROLLER mit MOVIKIT® (StackerCrane) MultiAxisController erfolgt, muss die Zusatzfunktion "Kombinierte Geberauswertung" im MOVIKIT® (StackerCrane) MultiAxisController aktiviert werden. Die entsprechende Funktion im Umrichter kann in diesem Fall nicht verwendet werden.
Gehen Sie zum Verwenden der Zusatzfunktion "Kombinierte Geberauswertung" wie folgt vor. Beachten Sie, dass der beschriebene Ablauf nur die relevanten Details zum Konfigurieren der Zusatzfunktion "Kombinierte Geberauswertung" und der Regleroptimierung betrachtet und bei anderen Rahmenbedingungen abweichen kann.
Voraussetzung: Der Antriebsstrang der untergeordneten Achse und ein Softwareknoten mit dem MOVIKIT® (StackerCrane) MultiAxisController sind in MOVISUITE® konfiguriert.
- Antriebsstrang konfigurieren
- Konfigurieren Sie in MOVISUITE® den Antriebsstrang und den externen Geber. Aktivieren Sie dabei nicht die kombinierte Geberauswertung am externen Geber.

- Das MOVIKIT® (StackerCrane) MultiAxisController konfiguriert die Positionsregelung im Antriebsstrang im Motorgeber automatisch so, dass die Motorgeberposition an den MOVI-C® CONTROLLER weitergegeben wird. Die Berechnungen für die kombinierte Geberauswertung mit dem externen Geber erfolgen im MOVI-C® CONTROLLER, da dort die Positionsregelung durchgeführt wird.
- Softwaremodul konfigurieren
- Wählen Sie zum Aktivieren der Zusatzfunktion "Kombinierte Geberauswertung" in der Konfiguration des MOVIKIT® (StackerCrane) MultiAxisController unter "Modulkonfiguration" > "Geberauswertung" im Abschnitt "Lageregler" als "Geberquelle" die Option "Motorgeber und externer Geber". Als Zeitkonstante kann vorerst der Vorschlagswert von 0.1 s übernommen werden.
- IEC-Projekt generieren und Optimierungsmonitor öffnen
- Generieren Sie über MOVISUITE® das IEC-Projekt und fügen Sie im IEC-Editor über das Menü "Tools" > "Scripting" > "Scripts" > "T" > "Trace_MultiAxisController" die Trace-Vorlage hinzu. Klicken Sie im Menü [Online] auf den Menüeintrag [Einloggen], öffnen Sie über den Geräte-Baum den Optimierungsmonitor und wechseln Sie durch Anklicken der beiden [Control]-Schaltflächen (Betriebsart der Bewegungssteuerung und der Optimierungsfunktionen) in den Steuerbetrieb.
- Externen Geber deaktivieren
- Deaktivieren Sie den externen Geber über die Schaltfläche [Deactivate all external encoder] im Menü "EncoderEvaluation".

- Lastträgheit ermitteln
- Verringern Sie die Steifigkeit auf z. B. 0.6 - 0.8 und konfigurieren Sie die Spielfreiheit auf 0 % über das Menü "Inverter settings" im Bereich "Dynamic behavior - speed controller".
- Wählen Sie nach dem Referenzieren der Antriebe die gewünschte Verfahrmöglichkeit (z. B. Speed-controlled).
- Tragen Sie wenn möglich je Achse einen Berechnungs- oder Schätzwert für die J-Last im Menü "Inverter settings" ein. Dieser Wert bezieht sich auf die Motorwelle.
- Ermitteln Sie dann durch Hin- und Herfahren der Achse die genaue Lastträgheit ohne Nutzlast und übernehmen Sie diesen Wert über die Schaltfläche [Transmit measured mean value to inverter and optimize speed controller].

- Drehzahlregler optimieren
- Optimieren Sie den Drehzahlregler über den Verfahrbereich ohne Nutzlast, indem Sie die Spielfreiheit entsprechend konfigurieren (20 % ≈ Lauf-/Reibrad, 70 % ≈ Zahnrad/Kette) und die Steifigkeit schrittweise bis zur leichten Schwingung im Menü "Inverter settings" im Bereich "Dynamic behavior - speed controller" erhöhen.
- Reduzieren Sie danach die Steifigkeit etwas, sodass keine Schwingung mehr auftritt oder z. B. ein sichtbares Rauschen des Drehmomentsignals kleiner als 10 % ist.

- Vorschlagswerte für Zeitkonstante und Lageregler verwenden
- Aktivieren Sie den externen Geber über die Schaltfläche [Deactivate all external encoder] im Menü "EncoderEvaluation", damit als Zeitkonstante der Vorschlagswert aus MOVISUITE® verwendet wird. Die kombinierte Geberauswertung ist nun aktiv. Führen Sie ggf. anschließend noch eine Referenzierung durch.
- Verwenden Sie als P-Verstärkung des Lagereglers die vorgeschlagenen 2 % (MOVIKIT® StackerCrane MultiAxisController) bzw. 100 % (MOVIKIT® MultiAxisController) des Vorschlagswerts im Menü "Control loop functions" im Bereich "Position controller" oder nähern Sie sich einem passenden Wert schrittweise an.

- Prüfen Sie anschließend die Positioniergenauigkeit, Geschwindigkeit und das Drehmoment anhand einer Trace-Aufzeichnung eines Positioniervorgangs.
- Führen die Vorschlagswerte nicht zu einem zufriedenstellenden Ergebnis, müssen die folgenden Schritte und/oder der Schritt "Erweiterte Optimierungsmaßnahmen" durchgeführt werden.
- Zeitkonstante des mechanischen Systems (Eigenfrequenz) ermitteln
- Deaktivieren Sie zum Verwenden des Motorgebers den externen Geber über die Schaltfläche [Deactivate all external encoder] im Menü "EncoderEvaluation".
- Führen Sie eine Trace-Aufzeichnung eines Stoppvorgangs mit dynamischer Stopp-Rampe ohne Ruck oder mit Bremseneinfall und im Idealfall mit Nutzlast und falls vorhanden mit maximaler Seil-/Gurtlänge durch.
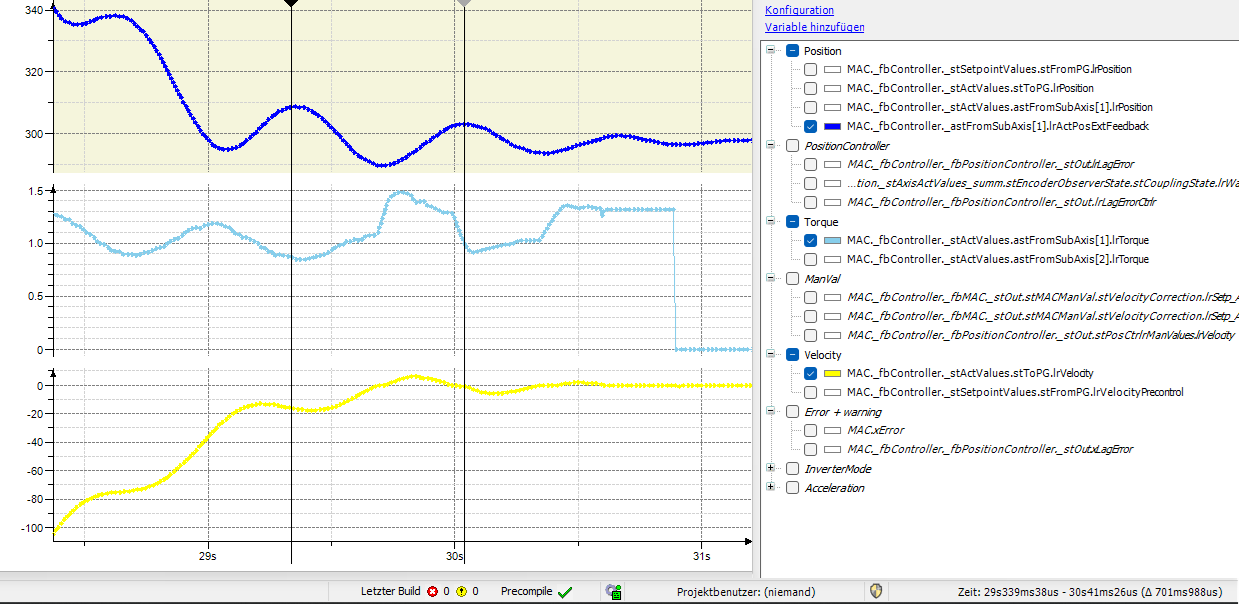
- Messen Sie die Periodendauer einer Schwingung nach dem Stoppvorgang über die Istposition des Streckengebers (lrActPosExtFeedback) oder anhand der Istgeschwindigkeit und dem Drehmoment. Alternativ können Sie auch die Dauer einer sichtbaren Schwingung, z. B. am Mast eines Regalbediengerätes, messen.
- Tragen Sie die ermittelte Periodendauer als Zeitkonstante für die kombinierte Geberauswertung im Menü "EncoderEvaluation" ein.

- P-Verstärkung des Lagereglers optimieren
- Aktivieren Sie den externen Geber über die Schaltfläche [Deactivate all external encoder] im Menü "EncoderEvaluation", sodass die kombinierte Geberauswertung aktiv ist.
- Reduzieren Sie den Vorschlagswert für die P-Verstärkung des Lagereglers auf ein Minimum (z. B. 2 %) im Menü "Control loop functions" im Bereich "Position controller" und erhöhen Sie den Wert schrittweise bis zum gewünschten Ergebnis.

- Prüfen Sie die Positioniergenauigkeit, die Geschwindigkeit und das Drehmoment anhand einer Trace-Aufzeichnung. Die Schwingungen sollten jetzt auf ein Minimum reduziert sein.
- Optimierte Konfigurationswerte prüfen
- Verfahren Sie mit niedrigen und hohen Beschleunigungen mit und ohne Nutzlast
- Verfahren Sie mit langsamen und schnellen Geschwindigkeiten mit und ohne Nutzlast
- Erweiterte Optimierungsmaßnahmen durchführen
- Führen Sie folgende Schritte durch, wenn die bisherigen Schritte noch kein zufriedenstellendes Ergebnis liefern:
- Positioniergenauigkeit nicht erreicht
- Wenn mit der Einstellung 100% für die P-Verstärkung des Lagereglers der Positioniervorgang immer noch nicht genau genug ist, das System jedoch nicht schwingt, erhöhen Sie die Steifigkeit des Drehzahlreglers im Menü "Inverter settings" im Bereich "Dynamic behavior - speed controller". Reduzieren Sie dabei die P-Verstärkung des Lagereglers im Menü "Control loop functions" im Bereich "Position controller" zunächst wieder und tasten Sie sich dann schrittweise an den neuen Maximalwert für die P-Verstärkung heran.
- Schwingung vor Erreichen der gewünschten Positioniergenauigkeit
- Wenn sich das System aufschwingt und der Positioniervorgang nicht genau genug ist, erhöhen Sie die Zeitkonstante der kombinierten Geberauswertung schrittweise um 10 % im Menü "EncoderEvaluation". Führt dies nicht zu einem besseren Ergebnis, stellen Sie den Drehzahlregler durch Reduzieren der Steifigkeit im Menü "Inverter settings" im Bereich "Dynamic behavior - speed controller" schwächer ein und optimieren Sie den Lageregler durch Anpassung der P-Verstärkung im Menü "Control loop functions" im Bereich "Position controller" neu.
