Sprunghafte Umschaltung der Werkzeugtransformation
HINWEIS
Folgendes Beispiel kann im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py].
Die sprunghafte Umschaltung der Werkzeugtransformation geschieht durch Überschreiben der Eigenschaften Interface_MyRobot.Config.Transformations.alrTool und MyRobot.fbMotionControl.alrTransformTool_Cyclic mit der gewünschten neuen Transformation. Mit dem Überschreiben von alrTool ist die Transformation dauerhaft wirksam. Das Überschreiben von alrTransformTool_Cyclic garantiert, dass die Transformation bereits im folgenden Zyklus wirksam ist, wenn der nächste Bewegungsbefehl interpretiert wird.
Nach dem Überschreiben ist die direkte Ausführung eines PTP-Befehls zwingend erforderlich. Hierzu muss sichergestellt sein, dass der SRL-Interpreter zu dem Zeitpunkt alle vorherigen Bewegungsbefehle interpretiert hat. Zusätzlich muss sich der Roboter im Stillstand befinden. Um diese Anforderungen zu gewährleisten, erfolgt die Umschaltung mittels IEC-CallFunction, aufgerufen durch den SRL-Befehl CALLF.
Um die Umschaltung zu verwenden, muss das dazugehörige SRL-Beispielprogramm ausgeführt werden.
Nach dem Import des IEC-Code-Beispiels muss der CallFunction-Baustein im USER_PRG wie folgt deklariert
fbCallFunction : CallFunction_SwitchToolTransformation;
und verlinkt werden.
USER_PRG.Init()
xInitDone :=
(* xInitDone AND *) MyRobot.LinkICallF(fbCallFunction)
Wegen möglicher Adressverschiebungen bei einem Online-Change sollten die Referenzen der Roboterinstanz in USER_PRG.Main() wie folgend dargestellt zyklisch übergeben werden.
fbCallFunction(
rInterface_Robot := Interface_MyRobot,
rRobot:= MyRobot);
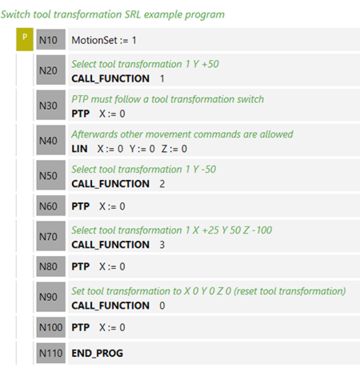
In folgendem SRL-Beispielprogramm werden nacheinander verschiedene Werkzeugtransformationen aktiviert. Zuletzt wird die Werkzeugtransformation deaktiviert durch Aktivieren der Transformation (0..0).
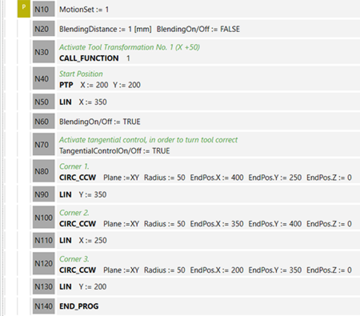
In folgendem SRL-Beispielprogramm wird die Werkzeugtransformation 1 ausgewählt, um eine konvexe Bearbeitung mit einem radialen Werkzeug entlang eines stetigen Bahnverlaufes zu simulieren. Es zeigt, wie die Werkzeugtransformation in Kombination mit der Tangentialsteuerung für eine einfache Werkzeugradiuskorrektur eingesetzt werden kann.