Tower sway
- Specify the "Distance between lifting and traveling vehicle" (at this lifting height, the oscillation is to be suppressed) by configuring the "Source of distance between lifting and traveling vehicle".
- Configuration value: Use the value specified manually in the "Distance between lifting and traveling vehicle" setting field in the "Basic settings" area.
- Configured axis: Use the position of a configured axis such as the lifting axis as a value. Thus, the sway suppression is always suitable for the lifting height or the distance between the lifting and traveling vehicle. To do so, select and configure the axis using the displayed setting fields. A "lifting position offset" can be used for compensation calculation if the value from the axis does not correspond to the actual distance between the lifting and traveling vehicle. You can also select the user unit of the lifting axis or enter a user-defined conversion factor for the user unit in meters.
- Configure the mechanical parameters of the application in the "Basic settings" area. The following figure illustrates the parameters available for this application type. For detailed descriptions of the parameters, refer to chapter Anti-sway control. If you do not already know the "Spring stiffness between tower and traveling vehicle" and the "Damping degree between tower and traveling vehicle", e.g. from mechanical simulations, you can activate Support for parameter determination here.
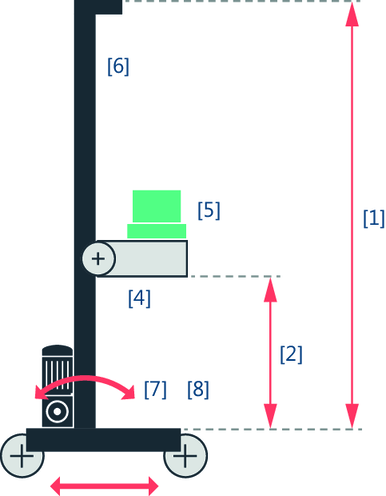
[1] | Height of the tower |
[2] | Distance between lifting and traveling vehicle |
[4] | Mass of the lifting vehicle |
[5] | Mass of the payload |
[6] | Mass of the tower |
[7] | Spring stiffness between tower and traveling vehicle INFORMATION: To determine this parameter, see chapter Determining stiffness. |
[8] | Damping ratio between tower and traveling vehicle INFORMATION: To determine this parameter, see chapter Determining stiffness. |
- Specify the time window by configuring the "Ramp time tension build-up" and the "Jerk time tension build-up" in the "Time window" area. These parameters describe the respective duration of the mechanical tension build-up. For longer times, more time is used for oscillation suppression and thus the dynamics of the correction signal is reduced. The positioning process is extended by these times. However, the jerk time of the travel axis can be reduced at the same time. A value is suggested for the two parameters, which you can apply and adjust, if necessary. The "Cycle time of the HighPrio task for limit value calculation" is also displayed in this area. The displayed value is drawn from the "Controller setpoint cycle" parameter of the lower-level member.
