MIXED_LRR_M20
Included in the MOVIKIT® Robotics add-on MediumModels license.
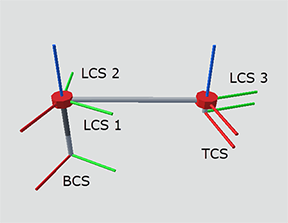
A MIXED kinematic model with 1 linear axis and 2 rotary axes that allows motion of the flange on the surface of a cylinder around the linear axis as well as rotation of the flange (around the axis parallel to Z).
- Joint axis 1: Z direction
- Joint axis 2: Rotates the arm around the shoulder axis (Z-axis).
- Joint axis 3: Rotates the tool around the wrist axis (parallel to the Z-axis).
INFORMATION:
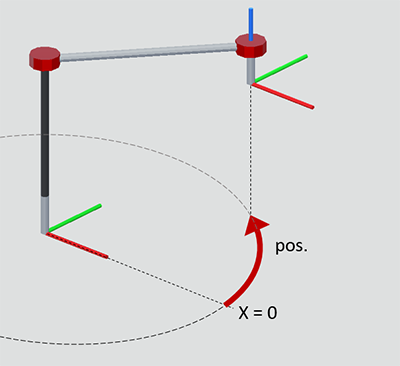
- For the specification of the coordinates of the TCP, the X-axis runs in the horizontal plane on the circular arc of the cylinder around the linear axis, with the zero point on the Cartesian X-axis of the base coordinate system. The Y coordinate is always "0" for this kinematic model.
- The tool and workpiece transformations may only contain values unequal to "0" in the Z coordinate.
Additional information