MIXED_LRR_M30
Enthalten in der Lizenz MOVIKIT® Robotics addon MediumModels.
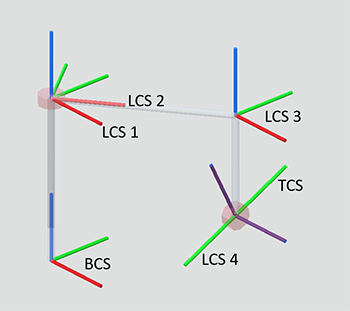
Ein MIXED-Kinematikmodell mit 1 Linearachse und 2 Drehachsen, das Bewegungen des Flansches auf der Oberfläche eines Zylinders um die Linearachse sowie Drehungen des Flansches (um Achse parallel zur kartesischen X-Achse des Basiskoordinatensystems) ermöglicht.
- Gelenkachse 1: Z-Richtung
- Gelenkachse 2: Dreht den Arm um die Schulterachse (Z-Achse)
- Gelenkachse 3: Dreht das Werkzeug um die Handgelenksachse (parallel zur X-Achse des Basiskoordinatensystems)
HINWEISE:
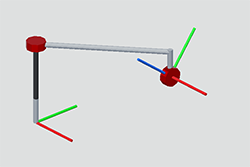
- Die Orientierung des Armglieds, an dem Gelenkachse 3 angebracht ist, wird mit einem Parallelogramm oder Riemen konstant gehalten.
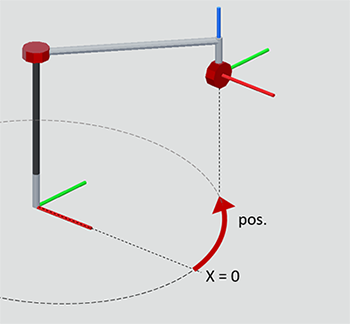
- Für die Angabe der Koordinaten des TCP verläuft die X-Achse in der horizontalen Ebene auf dem Kreisbogen des Zylinders um die Linearachse, mit Nullpunkt auf der kartesischen X-Achse des Basiskoordinatensystems. Die Y-Koordinate ist bei diesem Kinematikmodell immer "0".
- Die Werkzeug- und Werkstücktransformationen dürfen nur in der Z-Koordinate Werte ungleich "0" enthalten.
Weiterführende Informationen