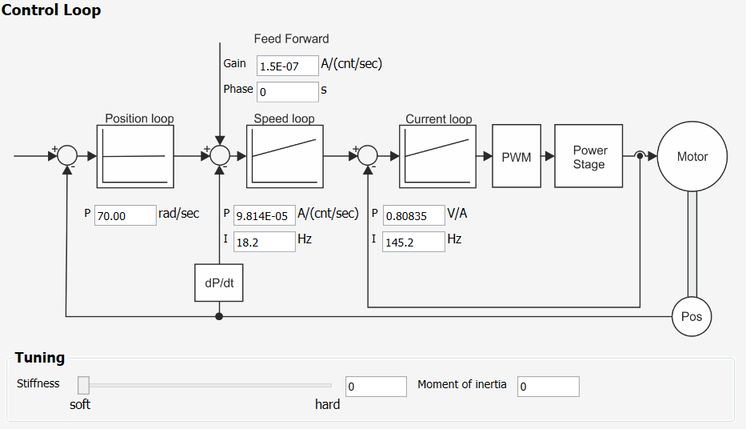
In the Control loop area, set the parameters of the respective controllers.
Use the tuning slider to set the moment of inertia. Changing the slider changes the corresponding parameter values depending on the selected motors.