Modulo axes
Control the axis in the Camming.Config.Stop structure as follows:
Interface in the IEC Editor

Procedure
- While the master axis is moving, the start signal xStart is removed in the "Camming" mode of the slave axis.
- With the configuration eStopMode = "WITH_CW_CCW_EXTERNAL_POSITION" and eTransitionType = "MASTERBASED", the eGearingState state first switches from "ACTIVE" (3) to "WAITING_FOR_STOPPOSITION" (4).
- As soon as the master axis crosses the trigger position (stop position - half of desynchronization distance) (position of cursor), the master-based transition begins. The eGearingState state switches from "WAITING_FOR_STOPPOSITION" (4) to "GEAR_OUT" (5).
- After traveling the configured desynchronization distance lrGearOutDistance, the eGearingState state switches from "GEAR_OUT" (5) to "STOPPED" (0).
Trace recording
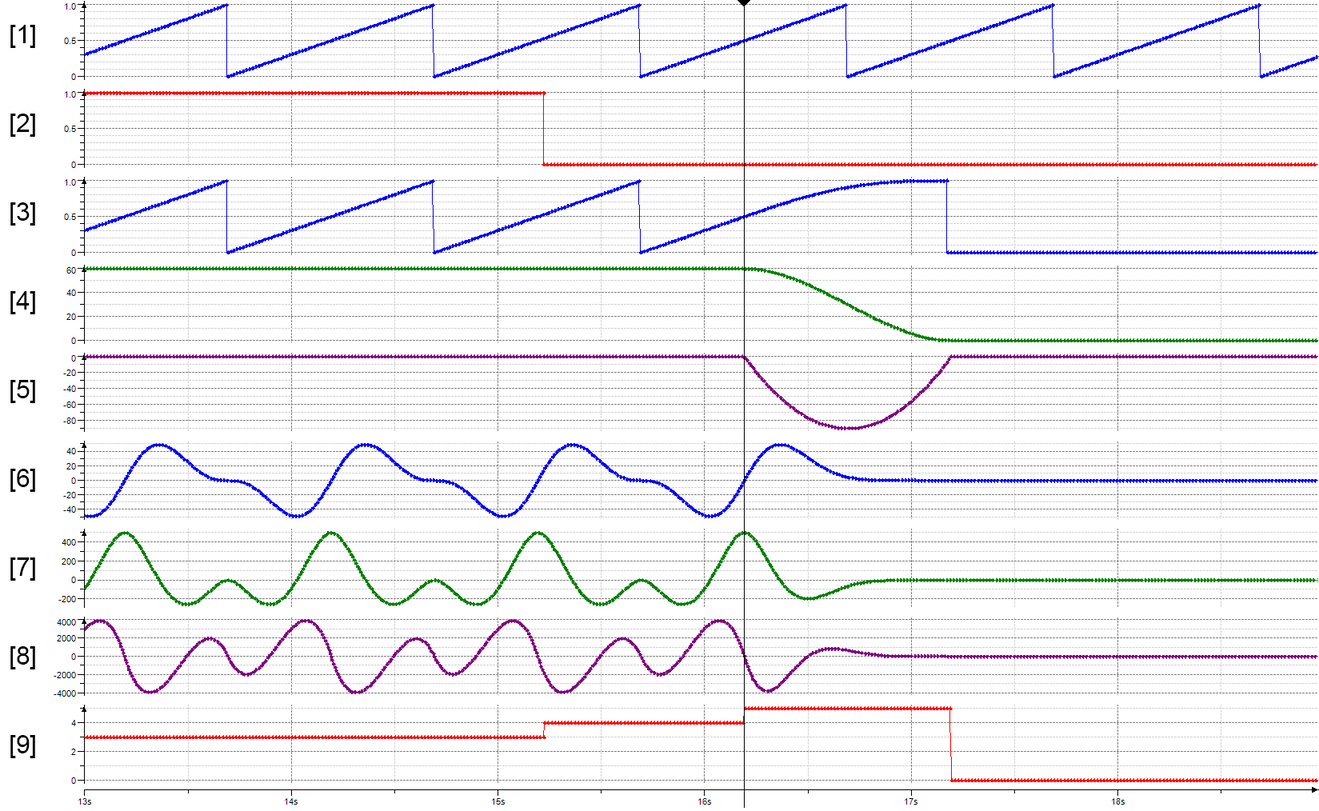
[1] | Position of the master axis |
[2] | xStart start signal of the Camming mode |
[3] | Position of the internal master |
[4] | Speed of the internal master |
[5] | Acceleration of the internal master |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
[9] | eGearingState state of the Camming mode |
