Fliegende Umschaltung von Velocity zu Positioning mit Modulo-Achse
Folgendes Anwendungsbeispiel zeigt Ihnen, wie Sie eine fliegende Betriebsart-Umschaltung, bei der eine Betriebsart die anderen ablöst, umsetzen. Die ursprüngliche Betriebsart wird zur selben Zeit inaktiv, wie die neue Betriebsart aktiv wird. Schalten Sie für die fliegende Umschaltung in demselben Zyklus in der Betriebsart "Velocity" die Steuersignale xActivate und xStart auf "FALSE" und in der Betriebsart "Positioning" die Steuersignale xActivate und xStart auf "TRUE".
Ansteuerung
Steuern Sie die Achse in der Struktur Velocity folgendermaßen an:
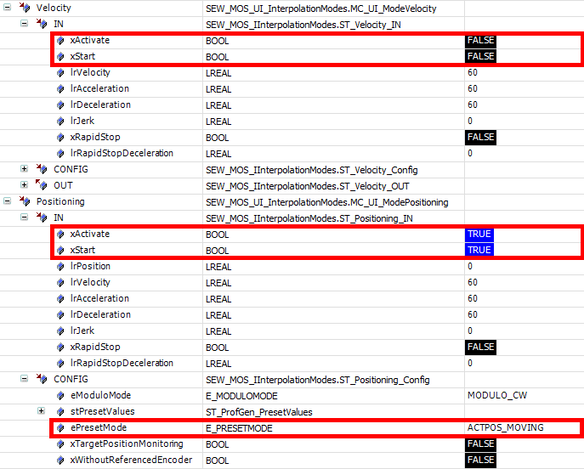
- Setzen Sie xActivate auf "TRUE", um die Betriebsart zu aktivieren.
- Definieren Sie die Sollwerte lrVelocity, lrAcceleration, lrDeceleration und lrJerk.
- Setzen Sie xStart auf "TRUE", um die Betriebsart zu starten.
Steuern Sie die Achse in der Struktur Positioning folgendermaßen an:
- Definieren Sie in der Struktur Positioning die Sollwerte lrPosition, lrVelocity, lrAcceleration, lrDeceleration und lrJerk.
- Setzen Sie in der Struktur CONFIG eModuloMode auf "MODULO_CW".
- Setzen Sie in der Struktur CONFIG ePresetMode auf "ACTPOS_MOVING".
Steuern Sie die Achse für die fliegende Umschaltung in demselben Zyklus folgendermaßen an:
- Setzen Sie in der Struktur Velocity xActivate und xStart auf "FALSE" und in der Struktur Positioning xActivate und xStart auf "TRUE".
Schnittstelle im IEC-Editor
Anmerkung:
Im Unterschied zu einer Linear-Achse hängt in diesem Fall das Verhalten vom eingestellten Modulo-Mode ab (Hier: "MODULO_CW"):
Trace-Aufzeichnung

[1] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xActivate |
[2] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.In.xStart |
[3] | SEW_GVL.Interface_Axis1.ProfileGeneration.Positioning.In.xActivate |
[4] | SEW_GVL.Interface_Axis1.ProfileGeneration.Positioning.In.xStart |
[5] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[6] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[7] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[8] | SEW_GVL.Interface_Axis1.ProfileGeneration.Velocity.Out.xInVelocity |
[9] | SEW_GVL.Interface_Axis1.ProfileGeneration.Positioning.Out.xInPosition |
Anmerkung:
Ähnlich wie beim StopAtPosition stoppt die Bewegung an der vorgegebenen Position (in diesem Fall die Nullposition).
