Axis-joint transformation
INFORMATION
The
Physics simulation
function is only available without "Axis joint transformation".
Additional information
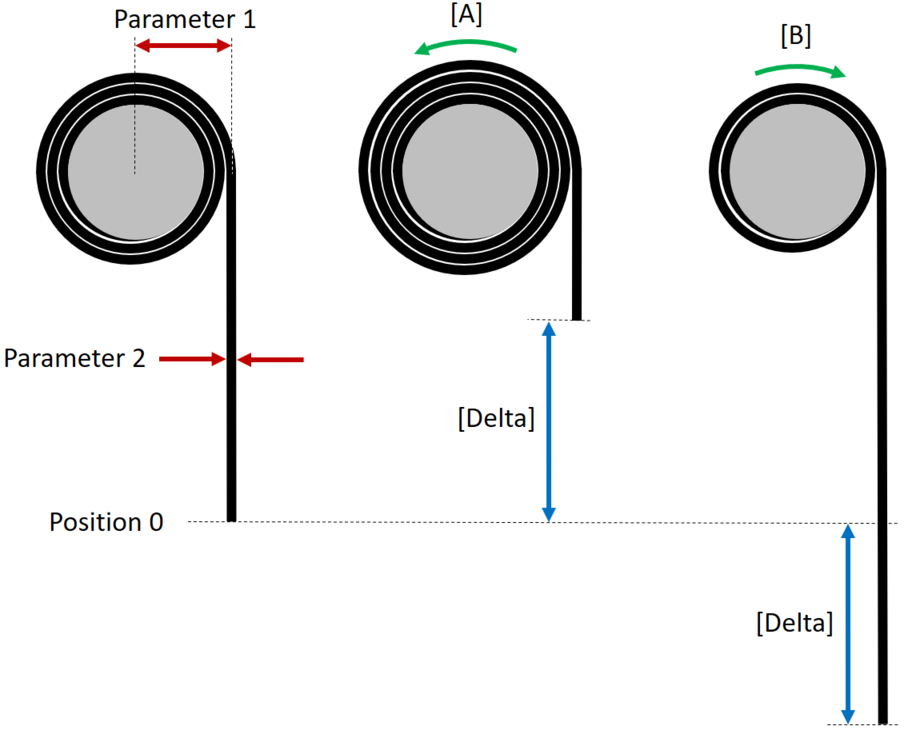
Coupling table
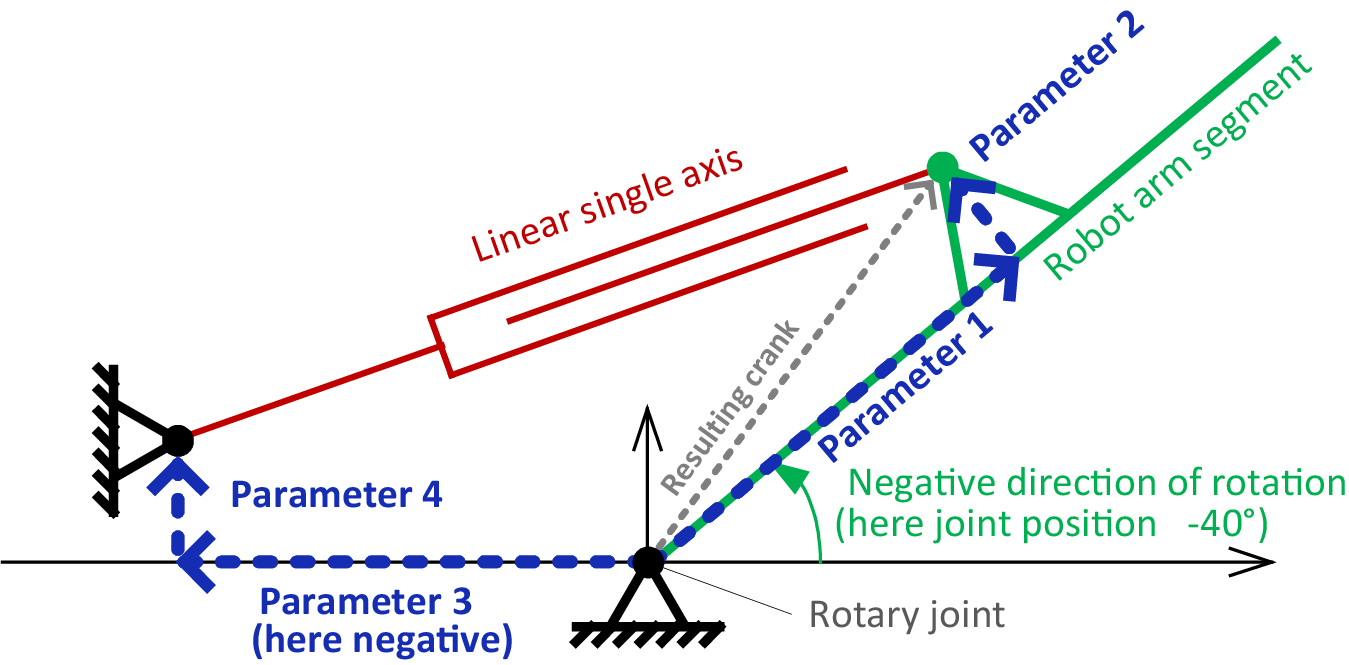
Crank parameter table
MOVIKIT® Robotics
Language
Deutsch
English
SEW-EURODRIVE
Home
Configuration
Axis-joint transformation