Linearachse zu Drehgelenk
Bei diesem Kurbeltyp wird die Bewegung einer linearen Einzelachse in die Bewegung einer rotativen Gelenkachse übertragen.
Beispiel:
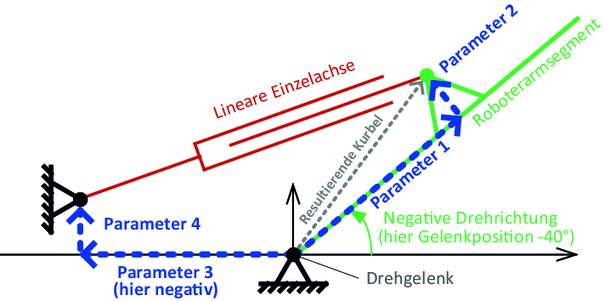
Im abgebildeten Beispiel sind Parameter 1, 2 und 4 positiv, Parameter 3 ist negativ. Da Parameter 2 positiv ist, bewegt sich die lineare Einzelachse in der Abbildung oberhalb der rotativen Gelenkachse. Wäre Parameter 2 negativ, würde sich die lineare Einzelachse unterhalb der rotativen Gelenkachse bewegen. Der Roboterarm hat in dem Beispiel den Gelenkachswert -40°. Zeigt der Roboterarm z. B. horizontal nach rechts, hat er den Gelenkachswert 0°. Zeigt der Roboterarm z. B. senkrecht nach oben, hat er den Gelenkachswert -90°. Die lineare Einzelachse müsste also zum Anfahren von 0° gegenüber der Stellung in der Abbildung verlängert und zum Anfahren von -90° verkürzt werden.
Parametrierung
Parameter | Beschreibung |
|---|---|
Kurbeln | |
Index | Index von Einzelachse und Gelenkachse, zwischen denen die Kurbel wirkt (Für die 1. Achse muss der Wert 1 eingegeben werden.) |
Parameter 1 | Versatz, ausgehend von der rotativen Gelenkachse, entlang des Roboterarms, der um die rotative Gelenkachse gedreht wird, hin zum Scharniergelenk zwischen linearer Einzelachse und Roboterarm |
Parameter 2 | Zusätzlicher Versatz, senkrecht zum Roboterarm, in Bewegungsebene des Roboterarms, hin zum Scharniergelenk zwischen linearer Einzelachse und Roboterarm. Abhängig vom Vorzeichen von Parameter 2 bewegt sich die lineare Einzelachse auf der einen oder der anderen Seite der rotativen Gelenkachse. |
Parameter 3 | Versatz, ausgehend von der rotativen Gelenkachse, entlang der Achse des Roboterarms bei Gelenkachswert 0°, hin zum Scharniergelenk zwischen der Verankerung und der linearen Einzelachse. (Parameter 3 < 0) |
Parameter 4 | Zusätzlicher Versatz, senkrecht zur Achse von Parameter 3, in Bewegungsebene des Roboterarms, hin zum Scharniergelenk zwischen der Verankerung und der linearen Einzelachse. |
Parameter 5..8 | nicht verwendet |
