Nicht sicherheitsbewertete Freigabesteuerung
Zum Implementieren einer nicht sicherheitsbewerteten Freigabesteuerung, weisen Sie die geforderte Freigabeart den im Folgenden aufgeführten Variablen in SEW_GVL_internal zu.
Anwendungsbeispiele:
- Verschaltung des Signals einer Sicherheitssteuerung an den MOVI-C® CONTROLLER zum bahntreuen Anhalten des Roboters vor Aktivierung von STO, durch die Sicherheitssteuerung am MOVIDRIVE®-Umrichter der Generation C.
- Applikative Hardware-Endschalter bei einem ROLLER GANTRY
- Eine applikative Arbeitsraum- oder Kollisionsüberwachung
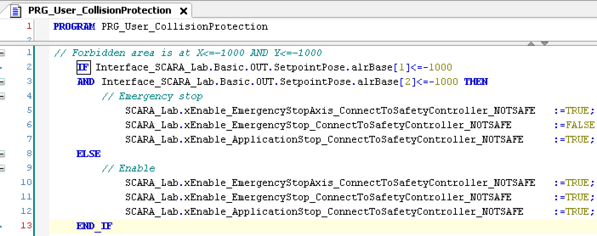
Der Vorteil dieser Variablen gegenüber den Freigabesignalen in den Steuerquellen (UserInterface SEW_GVL, RobotMonitor, Feldbusschnittstelle) ist, dass sie unabhänigig von der zugriffsberechtigten Steuerquelle immer wirken. Wenn also mindestens eines der drei folgenden Signale nicht "TRUE" ist, wird unabhängig von den Freigabesignalen in den Steuerquellen ein Halt ausgelöst ("MyRobot" entspricht dem vom Anwender in MOVISUITE® festgelegten Namen des Roboter-Knotens.).
MyRobot.
xEnable_EmergencyStopAxis_ConnectToSafetyController_NOTSAFE :=
xApplicativeEnable_EmergencyStopAxis;
MyRobot.
xEnable_EmergencyStop_ConnectToSafetyController_NOTSAFE :=
xApplicativeEnable_EmergencyStop;
MyRobot.
xEnable_ApplicationStop_ConnectToSafetyController_NOTSAFE :=
xApplicativeEnable_ApplicationStop;
Die höchste Priorität hat das Rücksetzen auf "FALSE" des Signals
xEnable_EmergencyStopAxis_ConnectToSafetyController_NOTSAFE, gefolgt von
xEnable_EmergencyStop_ConnectToSafetyController_NOTSAFE.
Die Wegnahme der Freigabe in den Steuerquellen wirkt zusätzlich.